



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、机械工业出版社机械工业出版社自动控制原理2第第2 2章章 控制系统数学模型的建立控制系统数学模型的建立2.1 2.1 概述概述2.2 2.2 控制系统微分方程的建立控制系统微分方程的建立2.3 2.3 传递函数传递函数2.4 2.4 控制系统的结构图控制系统的结构图2.5 2.5 控制系统的信号流图控制系统的信号流图2.6 2.6 控制系统的传递函数控制系统的传递函数自动控制原理32.1 概述概述数学模型数学模型: 描述系统各变量之间关系的数学表达式叫做系统的数学模型。描述系统各变量之间关系的数学表达式叫做系统的数学模型。动态模型:动态模型:描述系统动态过程的方程式称为动态模型。如微分方程、偏
2、描述系统动态过程的方程式称为动态模型。如微分方程、偏微微分方程、差分方程等。分方程、差分方程等。建立系统数学模型时,应注意:建立系统数学模型时,应注意:(1)根据研究目的和精确性要求,忽略一些次要因素,使系)根据研究目的和精确性要求,忽略一些次要因素,使系统数学模型简化,便于数学上的处理。统数学模型简化,便于数学上的处理。(2) 根据所采用的分析方法,建立相应形式的数学模型根据所采用的分析方法,建立相应形式的数学模型(微微分方程、传递函数等分方程、传递函数等),有时还要考虑便于计算机求解。,有时还要考虑便于计算机求解。建立系统数学模型的途径:建立系统数学模型的途径:理论推导法(演绎法)理论推导
3、法(演绎法)通过系统本身机理通过系统本身机理(物理、化学规物理、化学规律律)分析确定模型结构和参数,推导出系统的数学模型。分析确定模型结构和参数,推导出系统的数学模型。实验测试法(归纳法)实验测试法(归纳法)根据对系统的观察,由测量得到根据对系统的观察,由测量得到的大量输入、输出数据,推断出被研究系统的数学模型。的大量输入、输出数据,推断出被研究系统的数学模型。自动控制原理4建立系统建立系统(或部件或部件)微分方程式的一般步骤:微分方程式的一般步骤:(1)在条件许可下,适当简化,忽略一些次要因素;在条件许可下,适当简化,忽略一些次要因素; (2)根据物理或化学定律,列出部件的原始方程式;根据物
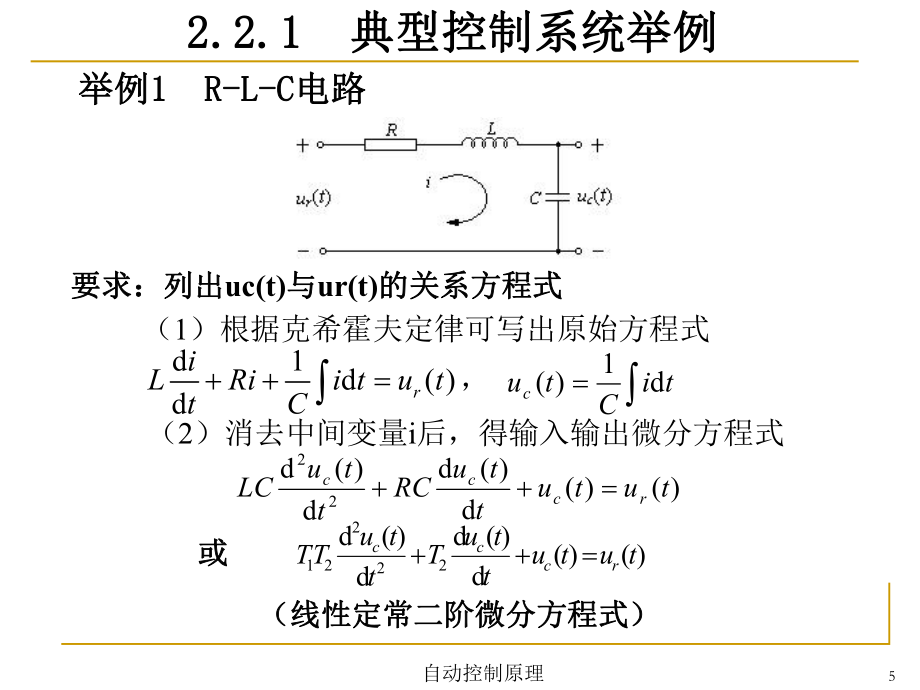
4、理或化学定律,列出部件的原始方程式;(3)列出原始方程式中中间变量与其它变量的关系式;列出原始方程式中中间变量与其它变量的关系式; (4)从所有方程式中消去中间变量,仅保留系统的输从所有方程式中消去中间变量,仅保留系统的输入变量和入变量和 输出变量;输出变量; (5)最后,将微分方程表示成标准形式,即输出变量最后,将微分方程表示成标准形式,即输出变量在左,输在左,输 入变量在右,导数阶次从高到低排列。入变量在右,导数阶次从高到低排列。2.2 2.2 控制系统微分方程的建立控制系统微分方程的建立自动控制原理5举例举例1 R-L-C1 R-L-C电路电路 要求:列出要求:列出uc(t)与与ur(t
5、)的关系方程式的关系方程式 (1)根据克希霍夫定律可写出原始方程式d1d( )driLRii tu ttC,tiCtucd1)((2)消去中间变量i后,得输入输出微分方程式 )()(d)(dd)(d22tututtuRCttuLCrccc)()(d)(dd)(d22221tututtuTttuTTrccc或或(线性定常二阶微分方程式)(线性定常二阶微分方程式) 2.2.1 2.2.1 典型控制系统举例典型控制系统举例自动控制原理6举例举例2 2 弹簧弹簧质量质量阻尼器系统阻尼器系统 (1)列出原始方程式。根据牛顿第二定律,有要求:写出系统在外力要求:写出系统在外力f (t)作用下的运动方程式作
6、用下的运动方程式2221dd)()()(tyMtftftf(2)消去中间变量 ttyBtfd)(d)(1B 阻尼系数 f2 (t) = Ky(t) K 弹性系数 22d( )d ( )1( )( )ddMy tBy ty tf tKtKtK代入上式并整理(线性定常二阶微分方程式)(线性定常二阶微分方程式) 自动控制原理7举例举例3 3 电枢控制的直流电动机电枢控制的直流电动机 电枢电压控制的直流电动机线路原理图和结构图电枢电压控制的直流电动机线路原理图和结构图(1)列写原始方程式。电枢回路方程式: 输入电枢电压ua 输出轴角位移q 或角速度w 扰动负载转矩MLaeaaauKiRtiLdd根据刚
7、体旋转定律,写出运动方程式:dLMMtJdd(2)Md和ia是中间变量。由于电动机转矩与电枢电流和气 隙磁通的乘积成正比,又因磁通恒定,有 ,amdiKM联立求解,整理后得 tMKKLMKKRuKtKKJRtKKJLLmeaLmeaaemeameadd1dddd22自动控制原理8(续上页)(续上页)若输出为电动机轴的转角q ,则有 tMJTTMJTuKttTtTTLmaLmaemmadd1dddddd2233(三阶线性定常微分方程)(三阶线性定常微分方程) meamKKJRT机电时间常数(秒)aaaRLT 电动机电枢回路时间常数(秒) , 一般比Tm小tMKKLMKKRuKtKKJRtKKJL
8、LmeaLmeaaemeameadd1dddd22tMJTTMJTuKtTtTTLmaLmaemmadd1dddd22或或自动控制原理9举例举例4 4 磁场控制的直流电动机磁场控制的直流电动机 设电枢电流Ia=常数,气隙磁通F(t)= Kf if (t),激磁回路电感Lf为常值。dddJBMt(1)激磁回路方程式:tiRufffddffiffffuBRKtBJRLtBJRLdd)(dd22fdmfmfuKtTTtTTdd)(dd22或(2)转矩平衡方程式: (3)消去中间变量j, Md : ,dmmffi fMKK K iK iffL i自动控制原理10举例举例5 5 电动机转速控制系统电动机
9、转速控制系统 电动机转速控制系统原理图及结构图 w为输出,ur为参考输入,ML为扰动输入(1)列各部件方程式:22ddd1dddammLammaLeT TTMT TTuMttKJtJ,aattrtuK euKeuu(2)消去中间变量,得:22ddd(1)dddaammLammrLeKT TTMT TTKuMttKJtJ,ateK KKK自动控制原理11举例举例6 6 流体过程流体过程 输入量Qi(供水量) 输出量H (液面高度)(一阶非线性微分方程式)(一阶非线性微分方程式) (1)设流体是不可压缩的。根据物质守恒定律,可得0d()diS HQQt HQ0iQSHStH1dd(2)求出中间变量
10、Qo与其他变量关系(3)消去中间变量Qo ,就得输入输出关系式自动控制原理12 直流电动机转速自动镇定系统图 设各处信号(变量)均在工作点附近不大范围内变动。列原始方程(1) 激磁回路 (j与if是非线性关系) (2) 电枢回路 (非线性方程) aeaaaauKiRtiLdd(3) 电动机 (非线性方程) ddLDDMaJMMMKit, 2.2.2 非线性微分方程的线性化非线性微分方程的线性化fffutiRdd(4) 放大器 (5) 测速发电机 ttuK(6) 比较器rteuufauK e自动控制原理1310202200)()dd(!1)()dd(! 21)dd(nnfnfnffffRiini
11、iiiffii00)dd(忽略二次以上高次项,得: , , ffLi)dd(0tanffiL0 j与if是之间的非线性关系 设j的工作点为j0 ,if 的工作点为if0 ,在工作点的邻域内,j对if的各阶导数存在,它可展开成泰勒级数: 2.2.2 非线性微分方程的线性化(续)非线性微分方程的线性化(续)写成偏量线性化方程式:ffLi所以激磁回路偏量线性化方程为: fffffuRitiT1dd自动控制原理14 同理,设各处信号(变量)均在工作点附近不大范围内变动,它们的偏量方程式可求之如下: 电枢回路 00d0daaaaeeiLRiKKt电动机 ,00()dLMaaJMKiitdffiC 2.2
12、.2非线性微分方程的线性化(续)非线性微分方程的线性化(续)放大器 eKuaf测速发电机 ttKu比较器 e=ur-ut ,因为ur =0 ,故tue 消去中间变量,得扰动输入ML下的线性化方程:323222ddd()()(1)ddddd() ddMafMaffMtamaMLLafafLT T TTTTTTK K K TKtttTMMT TTTMJtt ,00f aamfaC iRKRK自动控制原理15 2.3 传递函数传递函数 2.3.1 2.3.1 传递函数的概念传递函数的概念 RC RC电路如下:根据克希霍夫定律,电路如下:根据克希霍夫定律, 可列写微分可列写微分方程方程)()()(tu
13、tutRircttiCtucd)(1)(消去中间变量i(t),得)()(d)(dtututtuRCrcc)()()()(sUsURCusRCsUrccc0 对上式进行拉氏变换 求出Uc(s)的表达式)(1)(11)(0crcuRCsRCsURCssU若uc(0)=0 )(11)(sURCssUrc或1111)()()(TsRCssUsUsGrc式中 T=RC 自动控制原理16若线性定常系统由下述n阶微分方程描述令C(s)=Lc(t),R(s)=Lr(t),在初始条件为零时,进行拉氏变换,可得到s的代数方程 )()()()()(01110111sDsMasasasabsbsbsbsRsCsGnn
14、nnmmmm111101111ddddddddddddnnmmnnmmnnmmcccrrraaa cbbbb rtttttt 1111011nnmmnnmmsa sasaC sb sbsbsbR s传递函数定义传递函数定义: 线性线性(或线性化或线性化)定常系统在零初始条件下,输出量定常系统在零初始条件下,输出量的拉氏变换与输入量的拉氏变换之比称为传递函数。的拉氏变换与输入量的拉氏变换之比称为传递函数。 线性定常系统的传递函数为 2.3.1 2.3.1 传递函数的概念传递函数的概念( (续续) )自动控制原理172.3.1 2.3.1 传递函数的性质传递函数的性质 (1)传递函数是复变量s的有
15、理真分式函数,分子的阶数m一 般低于或等于分母的阶数n, 即mn ,且所有系数均为 实数。(2)传递函数只取决于系统和元件的结构和参数,与外作用 及初始条件无关。(3)一定的传递函数有一定的零、极点分布图与之对应,因 此传递函数的零、极点分布图也表征了系统的动态性能。 (5) 传递函数只能表示输入与输出的函数关系,至于系统中 的中间变量无法反映出来。1011111( )( )( )( )( )mmmmnnnnb sbsbsbC sM sG sR ssa sasaD s(4) 若下式中s = 0,则(0)mnbGa 称为传递系数(或静态放大系数)。 (6)一个传递函数只能表示一个输入对一个输出的
16、函数关系。自动控制原理182.3.1 2.3.1 典型环节及其传递函数典型环节及其传递函数1( )1G sTs(1)比例环节 G(s)= K (3 3)积分环节)积分环节 TssG1)(T 惯性环节时间常数 当积分环节的输入信号为单位阶跃当积分环节的输入信号为单位阶跃函数时,则输出为函数时,则输出为t/Tt/T,它随着时间直线,它随着时间直线增长。增长。 (2)惯性环节自动控制原理19(4)微分环节 G(s) = T s (理想微分环节 )1)(21sTsTsG(实际微分环节) (5) 比例微分环节 wn=1/T为无阻尼自然振荡频率 z为阻尼比,0z1sesG)()000( )( )d()d(
17、 )d( )ststssC sc t etr tetreeR s )1 ()(TsKsGc(6) 振荡环节222( )2nnnG sss (7)延滞环节2.3.1 2.3.1 典型环节及其传递函数典型环节及其传递函数( (续续) )自动控制原理202.4 2.4 控制系统的结构图控制系统的结构图 2.4.1 2.4.1 结构图的概念结构图的概念RiuucrtiCucd1拉氏变换 )()()(sRIsUsUcr)(1)(sICssUc)()()(1sIsUsURcrRC网络的微分方程式为自动控制原理21控制系统结构图的建立步骤控制系统结构图的建立步骤(1)建立控制系统各元部件的微分方程。在建立微
18、 分方程时,应分清输入量、输出量,同时应考 虑相邻元件之间是否有负载效应。(2)对各元件或部件的微分方程进行拉氏变换,并 作出各元件的结构图。(3)按照系统中各变量的传递顺序,依次将各部件 结构图连接起来,置系统输入变量于左端,输 出变量于右端。 自动控制原理22例例1 1 绘制无源电路的结构图。绘制无源电路的结构图。urur为网络输入,为网络输入,ucuc为网络输出。为网络输出。 因为(uruc) 为R1与C并联支路的端电压,i1+i2=i,R2i= uc ,所以2.4.2 2.4.2 控制系统结构图的建立控制系统结构图的建立 自动控制原理23例例2 2 两级两级RCRC网络的结构图网络的结
19、构图 (2)连接相关信号线,得到最终结构图(1)根据原始方程建立局部结构图 由于后一级RC电路是前一级的负载,所以在结构图中它们相互影响。自动控制原理24 为了消除负载效应,可以在两级RC电路之间插入隔离放大器。带有隔离放大器的两级带有隔离放大器的两级RC网络网络 自动控制原理25例例3 3 位置随动控制系统位置随动控制系统 系统各部分微分方程经拉普拉斯变换后的关系式及相应的局部结构图如下 ssrcUK()aasUK UabaaaUEIL sRdmaMK IbemEK s自动控制原理26dLmMMsBs2J1cmi 将每个子方程的结构图按照相互关系,正确地连接起来,得到下图 例例3 3 位置随
20、动控制系统(续)位置随动控制系统(续)自动控制原理272.4.3 2.4.3 结构图的等效变换结构图的等效变换 (1)(1)结构图的基本组成形式结构图的基本组成形式 1 1)串联连接)串联连接 2)并联连接 )()()()()()(122sRsGsGsUsGsC)()()()(21sGsGsRsC)()()()()()(2211sRsGsCsRsGsC)()()( )()()()()(2121sRsGsGsRsGsRsGsC)()()()(21sGsGsRsC自动控制原理283)反馈连接 按照信号传递的关系可写出: )()()()()()()()()(sBsRsEsCsHsBsEsGsC消去E
21、(s)和B(s),得 )()()()()()()()()()(sCsHsGsRsGsCsHsRsGsC)()()()()(1 )()()()(sRsGsCsHsGsCsHsGsC因此 此处的加号对应于负反馈;减号对应于正反馈。( )( )( )( )1( )( )C sG sW sR sG s H s2.4.3 2.4.3 结构图的等效变换结构图的等效变换( (续续) ) 自动控制原理29(2)(2)综合点与引出点的移动综合点与引出点的移动 1) 1)综合点的前后移动综合点的前后移动a. 综合点前移的 等效变换b. 综合点后移的 等效变换2)相邻综合点之 间的移动 2.4.3 2.4.3 结构
22、图的等效变换结构图的等效变换( (续续) ) 自动控制原理303)引出点的前后移动 b. 引出点前移的等效变换 4)相邻引出点之间的移动a. 引出点后移的等效变换 2.4.3 2.4.3 结构图的等效变换结构图的等效变换( (续续) ) 自动控制原理31(3)(3)结构图变换举例结构图变换举例 0LM 令 例1 位置随动系统2( )( )/( )/(/)/crsamameasamaw sssK K KR iJsBK KR sK K KR i2.4.3 2.4.3 结构图的等效变换结构图的等效变换( (续续) ) 自动控制原理32 例 2 简 化 结 构 图 , 并 求 系 统 传 递 函 数C
23、(s)/R(s) 。1432134323243211)()(HGGGGHGGHGGGGGGsRsC2.4.3 2.4.3 结构图的等效变换结构图的等效变换( (续续) ) 自动控制原理33例例3 3 化简两级化简两级RCRC网络结构图,并求出传递函数网络结构图,并求出传递函数Uc(s)/Ur(s)Uc(s)/Ur(s)。 2.4.3 2.4.3 结构图的等效变换结构图的等效变换( (续续) ) 自动控制原理34简化结构图求总传递函数的一般步骤简化结构图求总传递函数的一般步骤(1)确定输入量与输出量,如果作用在系统上的输入量有多个(分别作用在系统的不同部位),则必须分别对每个输入量逐个进行结构变
24、换,求得各自的传递函数。对于有多个输出量的情况,也应分别处理。(2)若结构图中有交叉关系,应运用等效变换法则,首先将交叉消除,化为无交叉的单回路结构。(3)对于回路可由里向外变换,直至变换为一个等效的方框,即得到所求的传递函数。自动控制原理352.5 2.5 控制系统的信号流图控制系统的信号流图2.5.1 2.5.1 信号流图定义:由节点和支路组成的信号传递网络信号流图定义:由节点和支路组成的信号传递网络信号流图的常用术语:信号流图的常用术语:节点:在图中用小圆圈表示,表示变量(或信号)节点:在图中用小圆圈表示,表示变量(或信号)支路:是连接相邻两个节点之间的定向线段支路:是连接相邻两个节点之
25、间的定向线段 ,它有一定的增,它有一定的增 益益( (即传递函数即传递函数) ),称为支路增益,称为支路增益输入节点:只有输出支路没有输入支路的节点称为输入节点输入节点:只有输出支路没有输入支路的节点称为输入节点 输出节点:只有输入支路没有输出支路的节点称为输出节点输出节点:只有输入支路没有输出支路的节点称为输出节点 混合节点:既有输入支路又有输出支路的节点称为混合节点混合节点:既有输入支路又有输出支路的节点称为混合节点通路:从某一节点开始沿支路箭头方向经过各相连支路到另通路:从某一节点开始沿支路箭头方向经过各相连支路到另 一节点所构成的路径称为通路一节点所构成的路径称为通路前向通路:是指从输
26、入节点开始并终止于输出节点且与其它前向通路:是指从输入节点开始并终止于输出节点且与其它 节点相交不多于一次的通路节点相交不多于一次的通路回路:如果通路的终点就是通路的起点,并且与任何其它节回路:如果通路的终点就是通路的起点,并且与任何其它节 点相交不多于一次的通路称为回路点相交不多于一次的通路称为回路不接触回路:如果一信号流图有多个回路,各回路之间没有不接触回路:如果一信号流图有多个回路,各回路之间没有 任何公共节点,则称为不接触回路任何公共节点,则称为不接触回路自动控制原理362.5.2 2.5.2 由系统结构图绘制信号流图由系统结构图绘制信号流图例例 试将下图所示系统的结构图转化为信号流图
27、。试将下图所示系统的结构图转化为信号流图。自动控制原理372.5.3 2.5.3 用梅逊公式求传递函数用梅逊公式求传递函数梅逊公式梅逊公式nkkkPP1式中,P 信号流图的总增益;称为特征式,kjijiiLLLLLL1 Li所有回路的回路增益之和; LiLj所有两两互不接触回路的回路增益乘积之和; LiLjLk所有三个互不接触回路的回路增益乘积之和; n从输入节点到输出节点所有前向通路的条数; Pk从输入节点到输出节点第k条前向通路的增益; Dk在中,将与第k条前向通路相接触的回路增益除去后 所余下的部分,称为余子式。自动控制原理38应用举例一应用举例一412345612324533441ii
28、LGG G G G G HG G HG G HG G H 32543235423232 )(HHGGGGHGGHGGLLLLji12345612324533442345231 1iijLL LGG G G G G HG G HG G HG G HG G G G H H 3254324433542321654321654321111HHGGGGHGGHGGHGGHGGGGGGGGGGGGpP112345611PGG G G G G ,自动控制原理39141227236452423452LG HLG G HLG G G HLG G G G H ,4个回路:1个两两互不接触回路:3条前向通路和相应余
29、子式:1123451216452312731111PGG GG GPGG G GPGG GL ,;,总增益:25432254627214147215461543213322111)1 ()(1)()(HGGGGHGGGHGGHGHGGGGGGGGGGGGGPPPPsRsC应用举例二应用举例二1241272L LG H G G H自动控制原理40应用举例三应用举例三 要求:绘制三级要求:绘制三级RC网络结构图,并求网络结构图,并求其传递函数其传递函数Uc/Ur 。(1)绘制结构图。用复阻抗与电压、电流关系,可以直接绘出网络的结构图: (2)求传递函数。该结构图有5个反馈回路,回路传递函数均相同,
30、即RCsLLL1521RCsLi5有6组两两互不接触回路,为-、-、-、-、-及-: 222sCRLLji6有1组三个互不接触的回路,即-: 3331sCRLLLkji自动控制原理41特征式为 333222111sCRsCRRCs LLLLLLkjijii65前向通路只有一条: 33311sCRP 前向通路与各反馈回路均有接触,余子式: 1 = 1则由梅逊公式可求得总传递函数:1111122233333322233311RCssCRsCR sCRsCRRCssCRPUUrc6565应用举例三(续)应用举例三(续)自动控制原理422.6 2.6 控制系统的传递函数控制系统的传递函数 闭环控制系统的典型结构图 r(t)输入信号n(t)扰动信号(1)r(t)作用下系统的闭环传递函数 1212( )( )( )( )( )1( )( )( )G s G sC sW sR sG s G s H s输出函数的拉氏变换1212( )( )( )( ) ( )( )1(
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 朔州市中医院姑息治疗在血液肿瘤中应用考核
- 晋城市人民医院髂静脉压迫综合征开放手术考核
- 白城市人民医院先天性心脏病超声考核
- 大庆市中医院细胞块制作技术考核
- 大庆市中医院儿童皮肤病诊疗考核
- 晋城市人民医院美容护肤方案制定考核
- 保定市中医院生活方式干预考核
- 中国樟油项目投资计划书
- 中国灭火剂项目经营分析报告
- 中国碱式碳酸钴项目商业计划书
- GB/T 1864-2012颜料和体质颜料通用试验方法颜料颜色的比较
- GB/T 13384-2008机电产品包装通用技术条件
- FZ/T 07019-2021针织印染面料单位产品能源消耗限额
- 《计算机辅助翻译》课程教学大纲
- 电厂化学运行规程
- 新版香港朗文1A-6B全部单词汇总
- 华南农大农业生态学
- 输血科检验科医生专业技术工作报告
- 《项目融资》课件
- YYT 0681.2-2010 无菌医疗器械包装试验方法 第2部分:软性屏障材料的密封强度
- 胸腔积液健康教育
评论
0/150
提交评论