



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
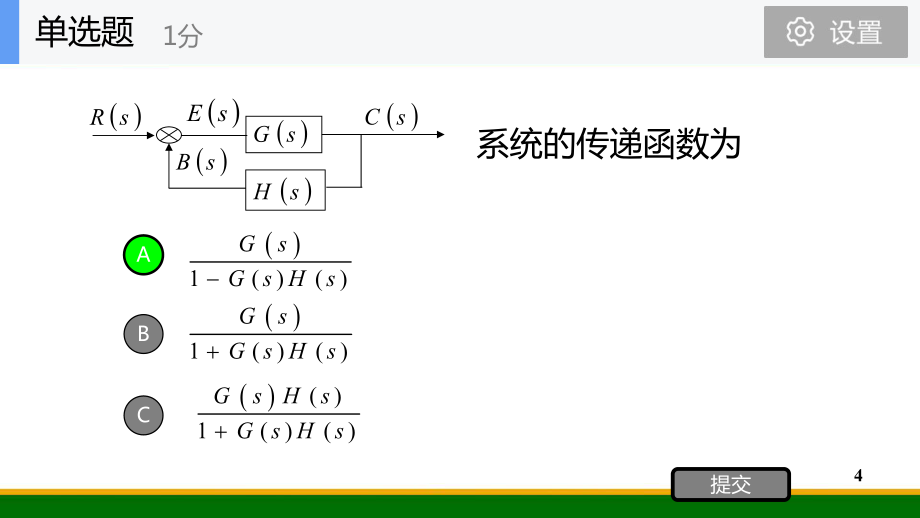
1、12一、结构图的定义一、结构图的定义二、结构图的组成二、结构图的组成三、控制系统结构图的绘制三、控制系统结构图的绘制四、结构图的等效变换和化简四、结构图的等效变换和化简五、自动控制系统的传递函数及其求取五、自动控制系统的传递函数及其求取0 回顾回顾3 sU sG1 sG2 sC sR )(21sGsG sC sR sC1 sG1 sG2 sC sR sC2 )(21sGsG sC sR0 回顾回顾4系统的传递函数为ABC提交 sE sG sH sC sR sB 1( )( )GsGs Hs 1( )( )GsGs Hs ( )1( )( )GsHsGs Hs单选题1分5AB提交 sG sC s
2、R sC sR sG sC sC? sG sG1单选题1分6 sG sC sR sQ sC sR sG1 sG Q s sG sC sR sQ sC sR sQ)(sG sG0 回顾回顾7 sC sR2 sR1 sR3 sR1 sR2 sR3 sC sR1 sR2 sR3 sC0 回顾回顾 sG sC sR sR sR sR sG sC sR sR sR sG sC sR sR8任何一个自动控制系统,经过结构图的等效变换,可化为如任何一个自动控制系统,经过结构图的等效变换,可化为如下所示的下所示的典型形式典型形式:五、自动控制系统的传递函数及其求取五、自动控制系统的传递函数及其求取)(1sG)
3、(2sG)(sH)(sC)(s )(sB)(sF( )R s-控制信号控制信号-被控信号被控信号- -偏差信号偏差信号-扰动信号扰动信号-反馈信号反馈信号( )Rs( )Cs( ) s( )Fs( )Bs9定义:定义:当反馈线断开,并使当反馈线断开,并使 ,系统工作在开环状态,系统工作在开环状态,反馈信号的拉氏变换与偏差信号拉氏变换之比。反馈信号的拉氏变换与偏差信号拉氏变换之比。)()()(ssBsGk 1( )G s2( )G s( )H s( )C s( ) s( )B s( )F sR(s)1 1、开环传递函数、开环传递函数0)(tf五、自动控制系统的传递函数及其求取五、自动控制系统的传
4、递函数及其求取10开环传递函数的求取开环传递函数的求取可见可见:系统开环传递:系统开环传递函数等于前向通路传函数等于前向通路传递函数与反馈通道传递函数与反馈通道传递函数的乘积。递函数的乘积。12( )( )( )( )( )( )kB sGsGs Gs Hss若令:若令:为前向通路传递函数,为前向通路传递函数,则:则:( )( )( )( )( )kB sGsG s H ss12( )( )( )G sGs Gs五、自动控制系统的传递函数及其求取五、自动控制系统的传递函数及其求取)(1sG)(2sG)(sH)(sC)(s )(sB)(sF( )R s11定义:定义:系统输出量的拉氏变换与系统输
5、入量的拉氏变换之比。系统输出量的拉氏变换与系统输入量的拉氏变换之比。)()()(sRsCs 2 对控制量的闭环传递函数记为:2 对扰动量的闭环传递函数记为:)()()(sFsCsf 2 2、闭环传递函数、闭环传递函数五、自动控制系统的传递函数及其求取五、自动控制系统的传递函数及其求取)(1sG)(2sG)(sH)(sC)(s )(sB)(sF( )R s12求取控制量的闭环传递函数求取控制量的闭环传递函数令令)(1)()()(1)()()()(1)()()()()(2121sGsGsHsGsGsHsGsGsGsGsRsCsk 0)(tf五、自动控制系统的传递函数及其求取五、自动控制系统的传递函
6、数及其求取)(1sG)(2sG)(sH)(sC)(s )(sB( )R s13求取扰动量的闭环传递函数求取扰动量的闭环传递函数 此时令此时令 ,将系统结构图变形为:,将系统结构图变形为:G2(s)H(s)-1G1(s)F(s)R(s)=0C(s)(1)()()(1)()()()(1)()()1)()(1)()()()(22122122sGsGsHsGsGsHsGsGsGsGsHsGsGsFsCskf 0)(tr五、自动控制系统的传递函数及其求取五、自动控制系统的传递函数及其求取)(1sG)(2sG)(sH)(sC)(s )(sB)(sF( )R s14系统的输出量系统的输出量 当系统同时存在控
7、制量和扰动量时,应用当系统同时存在控制量和扰动量时,应用叠加原理叠加原理,得:,得:( )( )( )( ) ( )( )( )rffC sCsCss R ss F s为系统单独在为系统单独在r(t)r(t)作用下的输出;作用下的输出;为系统单独在为系统单独在f(t)f(t)作用下的输出。作用下的输出。( )( )( )rCss R s( )( )( )ffCss F s五、自动控制系统的传递函数及其求取五、自动控制系统的传递函数及其求取)(1sG)(2sG)(sH)(sC)(s )(sB)(sF( )R s15定义:定义:系统偏差量的拉氏变换与系统输入信号的拉氏变换之比。系统偏差量的拉氏变换
8、与系统输入信号的拉氏变换之比。根据输入信号的不同,分为对控制量的偏差传递函数,记为:根据输入信号的不同,分为对控制量的偏差传递函数,记为:)()()(sRss 和对被扰动量的偏差传递函数,记为:和对被扰动量的偏差传递函数,记为:)()()(sFssf 3 3、系统的偏(误)差传递函数、系统的偏(误)差传递函数五、自动控制系统的传递函数及其求取五、自动控制系统的传递函数及其求取)(1sG)(2sG)(sH)(sC)(s )(sB)(sF( )R s16求取控制信号(参考输入)的偏差传递函数求取控制信号(参考输入)的偏差传递函数此时令此时令f(t)=0f(t)=012( )111( )( )1(
9、)( )( )1( )( )1( )kssR sGs Gs H sG s H sGs为求取方便,可将系统典型结构图变形为如下形式:为求取方便,可将系统典型结构图变形为如下形式: 五、自动控制系统的传递函数及其求取五、自动控制系统的传递函数及其求取H(s)G2(s)G1(s)R(s)(s)F(s)C(s)17求取扰动信号求取扰动信号f(t)的偏差传递函数的偏差传递函数( )?( )( )?fssF s此时令此时令r(t)=0r(t)=0五、自动控制系统的传递函数及其求取五、自动控制系统的传递函数及其求取)(1sG)(2sG)(sH)(sC)(s )(sB)(sF( )R s18的分子是ABCD提
10、交( )?( )( )?fssF s)(1sG)(2sG)(sH)(sC)(s )(sB)(sF( )R s1( )G s2( ) ( )G s H s2( )G s2( ) ( )G s H s单选题1分19求取扰动信号求取扰动信号f(t)的偏差传递函数的偏差传递函数)(1)()()()()(1)()()()()(2122sGsHsGsGsHsGsHsGsFsskf 此时令此时令r(t)=0r(t)=0五、自动控制系统的传递函数及其求取五、自动控制系统的传递函数及其求取)(1sG)(2sG)(sH)(sC)(s )(sB)(sF( )R s20系统的偏差量系统的偏差量( )( )( )( )
11、 ( )( )( )rffssss R ss F s)()()(sRssr 为在r(t)单独作用下的偏差;)()()(sFssff 为在f(t)单独作用下的偏差。根据叠加原理,有:根据叠加原理,有:五、自动控制系统的传递函数及其求取五、自动控制系统的传递函数及其求取例 已知系统结构图如图所示,试求系统的传递函数 和 。 sR sC sF sG1 sG2 sGC sGF)()(sRsC( )( )C sFs21五、自动控制系统的传递函数及其求取五、自动控制系统的传递函数及其求取解:应用线性叠加原理,首先令解:应用线性叠加原理,首先令 ,则系,则系统方框图可表示为:统方框图可表示为:例0)(sF
12、sR sC sG1 sG2 sGC sF sGF22五、自动控制系统的传递函数及其求取五、自动控制系统的传递函数及其求取例 化简内回路: sR sC)()()(1)()(2121sGsGsGsGsGC sC sR)()()()()(1)()(212121sGsGsGsGsGsGsGCcGGGGGGGRC2121211得到: 23五、自动控制系统的传递函数及其求取五、自动控制系统的传递函数及其求取例再令再令 ,则系统方框图可表示为:,则系统方框图可表示为: 0)(sR sF sC sGF sGC sG2 sG1 sR sC sF sG1 sG2 sGC sGF24五、自动控制系统的传递函数及其求
13、取五、自动控制系统的传递函数及其求取例可将方框可将方框 和方框和方框 间的比较点后移至方间的比较点后移至方框框 和方框和方框 间:间: sG1 sGC sGF sG2 sF sC sGF sGC sG2 sG1 sG125五、自动控制系统的传递函数及其求取五、自动控制系统的传递函数及其求取例再化简内回路再化简内回路 sG1 sGF)()()(1)(212sGsGsGsGc sF sC26五、自动控制系统的传递函数及其求取五、自动控制系统的传递函数及其求取例 可将方框后的比较点后移至主通道上:可将方框后的比较点后移至主通道上: )()()(1)()(212sGsGsGsGsGcF)()()(1)
14、()(2121sGsGsGsGsGc sF sC sG1 sGF)()()(1)(212sGsGsGsGc sF sC27五、自动控制系统的传递函数及其求取五、自动控制系统的传递函数及其求取两个子回路分别是并联、负反馈正反馈、负反馈正反馈、并联ABC提交)()()(1)()(212sGsGsGsGsGcF)()()(1)()(2121sGsGsGsGsGc sF sC28单选题1分例再化简内回路再化简内回路)(sF)(sC)()()(1)()()()()(121212sGsGsGsGsGsGsGsGccF)()()()()(1)()()(1212121sGsGsGsGsGsGsGsGcc)(s
15、F)(sC)()()()()(1)()()()()(12121212sGsGsGsGsGsGsGsGsGsGccF得到:ccFGGGGGGGGGGFC21212121129五、自动控制系统的传递函数及其求取五、自动控制系统的传递函数及其求取30系统建模方法:系统建模方法:p时域的微分方程时域的微分方程p复数域的传递函数复数域的传递函数p结构图结构图 31323 3 线性系统的时域分析法线性系统的时域分析法33 常用的系统分析方法常用的系统分析方法:时域分析法、根轨迹法和频域分析法时域分析法、根轨迹法和频域分析法,是经典控制理论的核心部分,是经典控制理论的核心部分。 时域分析法就是利用对系统的微
16、分方程或传递函数时域分析法就是利用对系统的微分方程或传递函数直接求直接求解解,得出得出系统输出随时间变化的系统输出随时间变化的规律规律,从而分析研究控制,从而分析研究控制系统的系统的时间工作特性时间工作特性的方法。的方法。时域分析法是一种直接在时域分析法是一种直接在时间域时间域中对系统进行分析的方法,中对系统进行分析的方法,具有具有直观直观、准确准确的优点,可以提供系统时间响应的的优点,可以提供系统时间响应的全部信息全部信息。34正弦函数正弦函数单位加速度函数单位加速度函数单位斜坡函数单位斜坡函数单位阶跃函数单位阶跃函数单位脉冲函数单位脉冲函数 复域表达式复域表达式 时域表达式时域表达式名名
17、称称0),(1 tt0, tt0,2/2 tt0),( tt tAsins/12/1 s3/1 s1)/(22 sA在学习性能指标之前,首先选择典型输入信号。在学习性能指标之前,首先选择典型输入信号。一、典型输入信号一、典型输入信号35在典型输入信号的作用下,任一控制系统的时间响应都由在典型输入信号的作用下,任一控制系统的时间响应都由动态过程动态过程(transient response)和)和稳态过程稳态过程(steady-state response)两部分组成。)两部分组成。二、动态过程与稳态过程二、动态过程与稳态过程t36控制系统的首要性能是稳定性快速性准确性阻尼性ABCD提交单选题1
18、分371 1、动态过程、动态过程动态过程又称动态过程又称过渡过程过渡过程或或瞬态过程瞬态过程,指系统在典型输入信号,指系统在典型输入信号的作用下,系统输出量从初始状态到最终状态的的作用下,系统输出量从初始状态到最终状态的响应过程响应过程。动态过程表现为动态过程表现为衰减、发散或等幅振荡衰减、发散或等幅振荡形式。形式。一个实际可运行的系统,其动态过程一定是衰减的,即系统一个实际可运行的系统,其动态过程一定是衰减的,即系统是是稳定稳定的。的。动态过程可提供系统的稳定信息、响应速度以及阻尼情况,动态过程可提供系统的稳定信息、响应速度以及阻尼情况,以以动态性能动态性能来描述。来描述。二、动态过程与稳态
19、过程二、动态过程与稳态过程382 2、稳态过程、稳态过程又称稳态响应,指系统在典型输入信号的作用下,当时间又称稳态响应,指系统在典型输入信号的作用下,当时间趋于无穷趋于无穷时,系统输出量的时,系统输出量的表现方式表现方式。表征系统输出量最终复现输入量的程度,提供系统有关稳表征系统输出量最终复现输入量的程度,提供系统有关稳态误差的信息,以态误差的信息,以稳态性能稳态性能来描述。来描述。控制系统在典型输入信号的作用下的性能指标,通常由控制系统在典型输入信号的作用下的性能指标,通常由动动态性能态性能和和稳态性能稳态性能组成。组成。二、动态过程与稳态过程二、动态过程与稳态过程391 1、动态性能、动态
20、性能通常描述稳定的系统在通常描述稳定的系统在单位阶跃函数单位阶跃函数作用下,动态过程作用下,动态过程随时间的变化状况的指标,称为随时间的变化状况的指标,称为动态性能指标动态性能指标。稳定稳定是控制系统能够运行的是控制系统能够运行的首要条件首要条件,只有当动态过程,只有当动态过程收敛时,研究系统的动态性能才有意义。收敛时,研究系统的动态性能才有意义。三、动态性能与稳态性能三、动态性能与稳态性能40单位阶跃响应单位阶跃响应)(h)(th)(9.0h)(5.0h)(1.0h0上升时间峰值时间调节时间延迟时间超调量误差带稳态误差tt三、动态性能与稳态性能三、动态性能与稳态性能41延迟时间(延迟时间(d
21、elay timedelay time)响应曲线第一次到达其响应曲线第一次到达其终值一半终值一半所需的时间所需的时间dt)(h)(th)(9.0h)(5.0h)(1.0h0上升时间峰值时间调节时间延迟时间超调量误差带稳态误差tt三、动态性能与稳态性能三、动态性能与稳态性能42上升时间(上升时间(rise timerise time)响应从终值的响应从终值的10%10%上升到终值的上升到终值的90%90%所需的时间所需的时间rt)(h)(th)(9.0h)(5.0h)(1.0h0上升时间峰值时间调节时间延迟时间超调量误差带稳态误差tt三、动态性能与稳态性能三、动态性能与稳态性能43上升时间亦可定
22、义为响应从上升时间亦可定义为响应从零第一次零第一次上升到上升到终值终值所需的时间所需的时间。上升时间是。上升时间是系统响应速度系统响应速度的一种度量。的一种度量。)(h)(th)(9.0h)(5.0h)(1.0h0上升时间峰值时间调节时间延迟时间超调量误差带稳态误差tt三、动态性能与稳态性能三、动态性能与稳态性能44峰值时间(峰值时间(peak timepeak time) 响应超过其终值到达响应超过其终值到达第一个峰值第一个峰值所需的时间所需的时间pt)(h)(th)(9.0h)(5.0h)(1.0h0上升时间峰值时间调节时间延迟时间超调量误差带稳态误差tt三、动态性能与稳态性能三、动态性能与稳态性能45调节时间(调节时间(settling timesettling time) 响应到达并响应到达并保持在终值保持在终值5%(5%(2%)2%)内内所需的最短时间所需的最短时间st)(h)(th)(9.0h)(5.0h)(1.0h0上升时间峰值时间调节时间延迟时间超调量误差带稳态误差tt三、动态性能与稳态性能三、动态性能与稳态性能46超调量(超调量(percent overshootpercent overshoot) 指响应的指响应的最大偏离量最大偏离量与终值之差与终值比的百分数与终值之差与终值比的百分数%)(h)(th)(9.0h)(5
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 货物采购电商合同范本
- 演出培训协议合同范本
- 美甲店合作协议书合同
- 物业安装隔断合同范本
- 物业扫地劳动合同范本
- 家校合作共促学生身心健康制度
- 美国外包用工合同范本
- 灯带配件采购合同范本
- 物业合同到期托管协议
- 烟囱爆破拆除合同范本
- 2025年甘肃省酒泉市肃州区招聘专职社区工作者106人笔试考试参考试题附答案解析
- 公司员工调岗通知书
- 2026年供销社考试题目及答案
- 员工晋升主管述职报告
- 演练方案特种设备事故应急预案演练记录叉车
- 唐代诗人李白生平简介及诗词鉴赏课件教学模板
- YS/T 886-2013纯钛型材
- 简单的轮胎供货合同范本
- DB34T3587-2020 《城镇排水管道检测与修复技术规程》
- KQ型智能控制器使用说明
- 16米空心板梁汽车吊吊装施工方案
评论
0/150
提交评论