



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
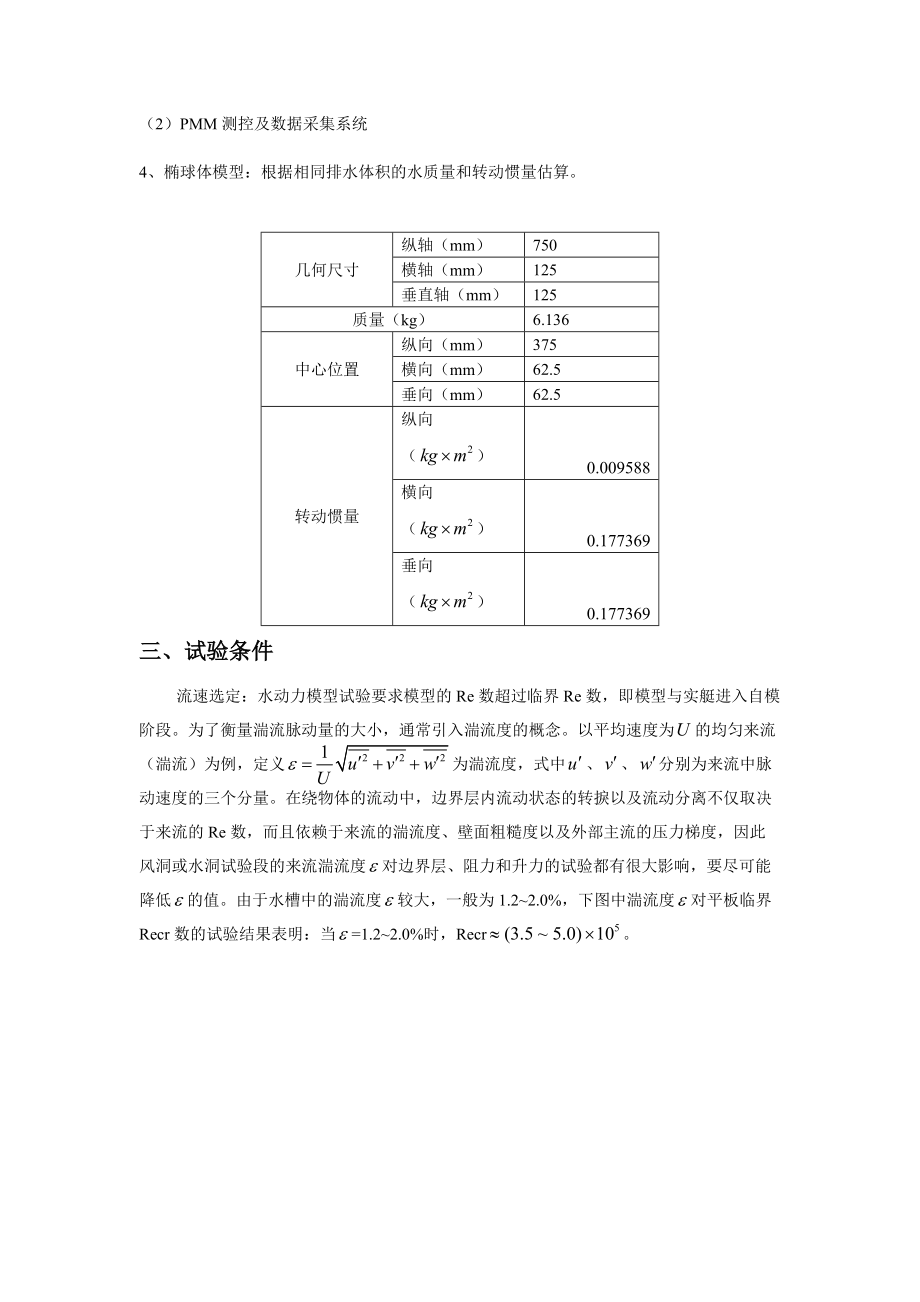
1、潜艇潜器设计原理实验椭球体纯升沉、纯俯仰运动水动力实验一、试验目的通过对规则形体(椭球体)在循环水槽均匀来流中做拘束的纯升沉和纯俯仰运动的水动力试验,熟悉潜器操纵性水动力试验的一般原理,试验方法和公式应用,掌握椭球体水动力系数的推导和测量过程,了解操纵性试验仪器设备的使用方法。二、试验设备1、水平型循环水槽稳流工作段尺寸:长度(m)7宽度(m)1.7深度(m)1.5流速范围:0.3m/s2.0m/s2、垂直型小振幅平面运动机构(Planar Motion Mechanism, PMM)1、平面运动机构75423161步进电机;2齿轮箱;3偏心机构;4光电控制装置;5限位轴承;6偏航角调节滑轨;
2、7振幅调节滑块;71234561步进电机;2齿轮箱;3偏心机构;4光电控制装置;5限位轴承;6偏航角调节滑轨;7振荡杆;机构参数:振幅范围(mm)0100振荡频率范围(Hz)0.051两杆跨距(mm)4003、测力系统:(1)六分力水密天平六分力水密天平(2)PMM测控及数据采集系统4、椭球体模型:根据相同排水体积的水质量和转动惯量估算。几何尺寸纵轴(mm)750横轴(mm)125垂直轴(mm)125质量(kg)6.136中心位置纵向(mm)375横向(mm)62.5垂向(mm)62.5转动惯量纵向()0.009588横向()0.177369垂向()0.177369三、试验条件流速选定:水动力
3、模型试验要求模型的Re数超过临界Re数,即模型与实艇进入自模阶段。为了衡量湍流脉动量的大小,通常引入湍流度的概念。以平均速度为的均匀来流(湍流)为例,定义为湍流度,式中、分别为来流中脉动速度的三个分量。在绕物体的流动中,边界层内流动状态的转捩以及流动分离不仅取决于来流的Re数,而且依赖于来流的湍流度、壁面粗糙度以及外部主流的压力梯度,因此风洞或水洞试验段的来流湍流度对边界层、阻力和升力的试验都有很大影响,要尽可能降低的值。由于水槽中的湍流度较大,一般为1.22.0%,下图中湍流度对平板临界Recr数的试验结果表明:当=1.22.0%时,Recr。引自水平型循环水槽的水动力性能-丁正良表1试验流
4、速及临界Re数判定来流速度(m/s)Re数临界数1.06四、试验原理1、纯升沉试验图4.1 升沉试验模型运动原理图目的:测量椭球体垂直面的水动力系数,两支杆按相同频率(),相同振幅(),相位差为零作正弦振荡,驱动模型在水流中垂直平面内作正弦升沉,模型的纵倾角始终为零。两支杆端部的垂向位移式中支杆的振荡圆频率,即偏心轮的角速度(rad/s)振幅。模型纯升沉运动的运动参数:纵倾角垂向速度垂向加速度模型作简谐运动,升沉速度和升沉加速度相位差为,即速度达到最大幅值时加速度为零,加速度达到最大幅值时速度为零。同时模型受到的拘束力和力矩亦是简谐的,只是和运动有相位差。测得升沉运动模型驱动力简谐时历曲线,驱
5、动力矩为,根据垂直面运动一般方程,纯升沉运动线性方程为:代入运动参数,运动方程写为测力系统测得的拘束力(矩)包括三部分:(1)与支杆振荡位移同相位的流体惯性力(矩)(2)与支杆振荡位移相位正交的阻尼力(矩)(3)常量部分(即零升力和零力矩:)。根据运动分解受力,用下标表示同相分量,用对表示正交分量:对应项系数相等,并且保证项对应升沉加速度峰值,对应升沉速度峰值,则水动力系数计算公式为试验步骤:1、 开启平面运动机构控制采集软件,选择工况【纯升沉】、【纯俯仰】,输入文件名:TQV*A*F*-*格式,其中V后用流速代替,A后用振幅代替,F后用当前频率代替。“-”后用当前试验次数代替,一般每组工况试
6、验两次。2、 输入模型质量,长度等属性,流速,振幅,选择振荡频率,输入偏移角A电机42.5°,B电机147.2°。点击保存。3、 点击【工况控制】选项卡,A,B电机分别归零,待电机停止后A,B分别偏移,待两电机停止后点击启动,4、 点击【采集】选项卡,依次点击【复位】->【采集】,采集满20个周期后点击确定,并点击【入库处理】,将采集受力时历进行相位分解。点击【电机停止】。5、 在船模系统文件夹下找到采集的数据,记录到试验报告中。6、 修改振荡频率,启动电机,重复4,5步操作。7、 试验结束,电机停止。关闭软件和数据库。试验时注意采集受力幅值数据可能对应速度或加速度的
7、峰值,也可能对应速度或加速度的谷值,如果是后者需要对采集数据取负。根据当前升沉速度或加速度为横坐标,受力幅值为纵坐标绘制试验曲线,曲线斜率为,项值,代入公式求解垂直面运动的水动力系数值,。2、纯俯仰运动图4.2 俯仰试验模型运动原理图目的:测量椭球体垂直面的水动力系数,纯俯仰运动时,模型中心点(测力点)在垂向简谐运动,同时保证模型迎流方向与中心轨迹曲线相切,从而使得任意时刻模型攻角、模型连体坐标系的垂向位移,速度与加速度均为零()。于是模型俯仰角轨迹当来流速度,中心处横荡速度。当俯仰角度较小时一阶近似为简谐运动。两支杆处距模型纵向中心点处的速度为:(为两杆间距的一半)前杆振荡速度后杆振荡速度两
8、杆亦是同频率,同振幅但有相位差的简谐运动,相位差(后杆对于前杆的滞后角)满足:模型中心处的振荡速度:模型中心振幅:杆的振幅:模型的运动参数为俯仰角俯仰角速度俯仰角加速度模型纵向速度设前后支杆拘束合力为,。根据垂直面运动一般方程模型作纯俯仰运动线性方程为:由于俯仰角速度的平方为二阶小量,忽略项。代入模型运动参数纯俯仰运动时测得的简谐拘束力和力矩分解为三部分(1)与俯仰角位移(角加速度)同相位的部分计作in项;(2)与俯仰角位移正交(角速度同相位)部分计作out项;(3)常量部分。对应项系数相等,并保证,项对应角加速度峰值,对应角速度峰值:得到试验步骤:1、 开启平面运动机构控制采集软件,选择工况
9、【纯升沉】或【纯俯仰】,输入文件名:TQV*A*F*-*格式,其中V后用流速代替,A后用振幅代替,F后用当前频率代替。“-”后用当前试验次数代替,一般每组工况试验两次。2、 输入模型质量,长度等属性,流速,振幅,选择振荡频率,通过程序计算支杆滞后角,并将(42.5-滞后角)输入偏移角A电机,B电机输入147.2°。点击保存。3、 点击【工况控制】选项卡,A,B电机分别归零,待电机停止后点击A,B分别偏移,待两电机停止后点击启动,4、 点击【采集】选项卡,依次点击【复位】->【采集】,采集满20个周期后点击确定,并点击【入库处理】,将采集受力时历进行相位分解。点击【电机停止】。5
10、、 在船模系统文件夹下找到采集的数据,记录到试验报告中。注意纯俯仰数据需要保存的in项和out项相反,即文件中的in项对应报告中的out项,文件中的out项对应报告中的in项。6、 修改振荡频率,启动电机,重复4,5步操作。7、 试验结束,电机停止。关闭软件和数据库。试验时注意采集受力幅值数据可能对应速度或加速度的峰值,也可能对应速度或加速度的谷值,如果是后者需要对采集数据取负。根据当前升沉速度或加速度为横坐标,受力幅值为纵坐标绘制试验曲线,曲线斜率为,项值,代入公式求解垂直面运动的水动力系数值,。五、模型试验数据记录处理表1.1 升沉运动受力记录表(航速 1.06 ,振幅0.02 )升沉频率
11、(Hz)(N)(N)(Nm)(Nm)0.20 0.0315830.0251333.6852-1.44650.138-1.01440.25 0.0493480.0314164.3555-2.1730.0734-1.29960.30 0.0710610.0376997.355-1.46560.2591-1.41880.35 0.0967220.0439828.8724-2.30610.095-1.68320.40 0.1263310.05026512.5642-1.43940.5275-1.6374表2.1 俯仰运动受力记录表(航速1.06)俯仰频率(Hz)俯仰振幅(rad)(N)(N)(Nm)(
12、Nm)0.20 0.023280.0367620.0292551.69670.3835-0.19990.3130.25 0.028660.0707160.0450192.25810.958-0.00060.34840.30 0.033790.1200580.0636933.06322.10310.33460.50630.35 0.038640.1868670.0849744.15483.80550.740.81450.40 0.043180.2727480.1085235.33474.20121.3250.785纯升沉运动数据处理:试验工况给定流速为1.06m/s,升沉运动幅值保持不变,改变运
13、动频率进而改变模型升沉运动的速度和加速度幅值。流速为1.06m/s驱动力,其无因次化导数流速为1.06m/s驱动力,其无因次化导数流速为1.06m/s驱动力矩,其无因次化导数流速为1.06m/s驱动力,其无因次化导数其中:-为水密度()-为模型的特征长度(m)-模型航速,即循环水槽流速(m/s)表1 纯升沉试验水动力系数值Table1 Hydrodynamic characteristics of pure heave motion流速(m/s)1.06纯俯仰运动数据处理:试验时给定流速为1.06m/s,拘束杆升沉幅值。系列改变振荡频率,据当前流速和运动频率选取拘束杆相位角,进而改变俯仰角速度和角加速度幅值。定流速为1.06m/s驱动力,其无因次化导数定流速为1.06m/s驱动力,其无因次化导数定流速为1.06m/s驱动力,其无因次化导数定流速为1.06m/s驱动力,其无因次化导数其中:-为水密度()-为模型的特征长度(m)-模型航速,即循环水槽流速(m/s)表2 纯俯仰试验水动力系数值Table2 Hydrodynamic characteristics of pure pitch motion流速(m/s)1.06六、实验总结与误差分析实验总结:通过实验,我认识和了解了实验水池平面运动机构
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 印染助剂合成工5S执行考核试卷含答案
- 2025学年青岛市莱西高二语文上学期期中考试卷附答案解析
- 罐头原料处理工安全教育评优考核试卷含答案
- 开切茧工班组考核考核试卷含答案
- 职工安置房联建协议书范本
- 2024年压力管道安装质量体系内审及管理评审相关资料
- 函数的概念及其表示-2026年高考数学一轮总复习(人教A版)含解析
- 技术支持服务响应流程
- 贵州省六盘水市2023-2024学年八年级上学期期中数学试题(含答案)
- 四年级新征程
- 2025广西玉林市福绵区退役军人事务局招聘编外人员3人笔试考试备考试题及答案解析
- 2025年抗菌药物临床合理应用培训考核试题含答案
- 2025年证监会专员岗位招聘面试参考试题及参考答案
- 9.2 奉献社会我践行 课件 2025-2026学年统编版道德与法治 八年级上册
- 动物疫病防治员岗前核心能力考核试卷含答案
- 2025广东深圳市盐田区第二批次招聘公共事务辅助员12人笔试考试备考题库及答案解析
- 2025年初中历史学科教师课程标准考试测试题及参考答案
- 企业员工正能量培训课件
- 2025广西国控集团秋季招聘考试笔试模拟试题及答案解析
- 《2025年健康体检服务合同协议》
- 哈工大理论力学第七版课后习题答案(高清无水印版)
评论
0/150
提交评论