



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、机械专业教研组v一、几个基本概念一、几个基本概念v1、平面连杆机构:构件全部用低副联接而、平面连杆机构:构件全部用低副联接而成的平面机构。(亦称平面低副机构)成的平面机构。(亦称平面低副机构)v2、平面四杆机构:平面连杆机构中最基本、平面四杆机构:平面连杆机构中最基本的是有四个构件(包括机架)组成的机构。的是有四个构件(包括机架)组成的机构。v3 、平面四杆机构类型、平面四杆机构类型:铰链四杆机构和移铰链四杆机构和移副四杆机构副四杆机构.v4、铰链四杆机构:构件间用四个转动副相、铰链四杆机构:构件间用四个转动副相连的平面四杆机构连的平面四杆机构。2-22-2平面四杆机构平面四杆机构机械专业教研
2、组二、平面连杆机构的特点和应用二、平面连杆机构的特点和应用v1、特点、特点v优点:优点:v(1)面接触低副,压强小,便于润滑,磨损轻,寿命长,传递动力大。面接触低副,压强小,便于润滑,磨损轻,寿命长,传递动力大。v(2)低副易于加工,可获得较高精度,成本低。低副易于加工,可获得较高精度,成本低。v(3)杆可较长,可用作实现远距离的操纵控制杆可较长,可用作实现远距离的操纵控制 。v(4)可利用连杆实现多种运动规律和运动轨迹。可利用连杆实现多种运动规律和运动轨迹。v缺点缺点:v(1)低副中存在间隙,精度低。低副中存在间隙,精度低。v(2)不容易实现精确复杂的运动规律。不容易实现精确复杂的运动规律。
3、机械专业教研组铰链四杆机构的基本型式铰链四杆机构的基本型式三、铰链四杆机构的基本型式及其演化三、铰链四杆机构的基本型式及其演化铰链四杆机构:平面四杆机构中,各运动副都是转动副。铰链四杆机构:平面四杆机构中,各运动副都是转动副。机械专业教研组概念概念v铰链四杆机构:平面四杆机构中,各运动铰链四杆机构:平面四杆机构中,各运动副都是转动副。副都是转动副。v曲柄曲柄:能作整周转动的连架杆。:能作整周转动的连架杆。v摇杆摇杆:只能在一定角度内摆动的连架杆。:只能在一定角度内摆动的连架杆。v机架:机架:机构中固定不动的构件。机构中固定不动的构件。v连架杆:连架杆:机构中与机架联接的构件。机构中与机架联接的
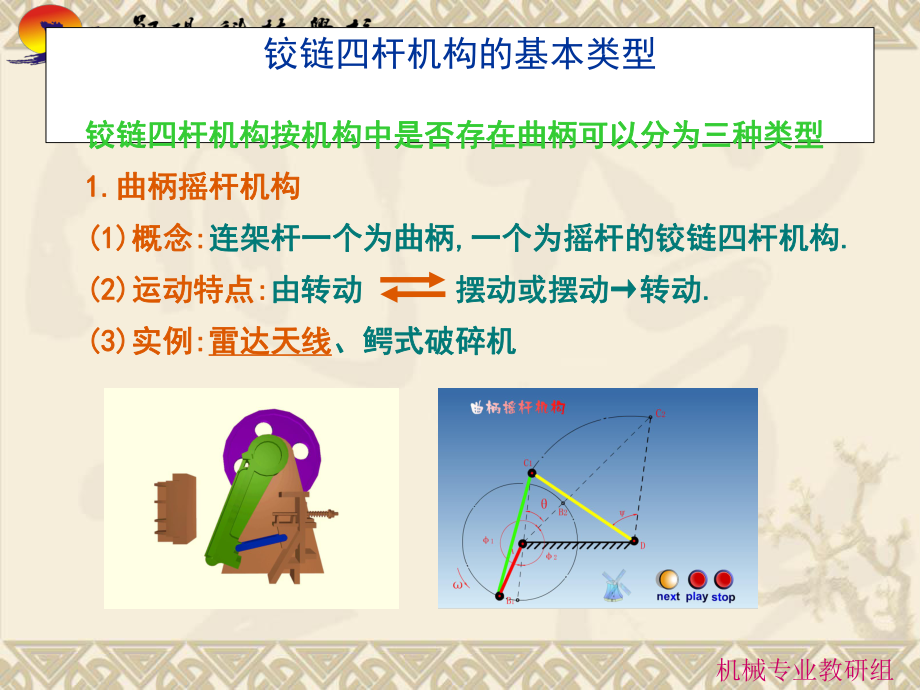
4、构件。机械专业教研组铰链四杆机构的基本类型铰链四杆机构按机构中是否存在曲柄可以分为三种类型铰链四杆机构按机构中是否存在曲柄可以分为三种类型1.1.曲柄摇杆机构曲柄摇杆机构(1)(1)概念概念: :连架杆一个为曲柄连架杆一个为曲柄, ,一个为摇杆的铰链四杆机构一个为摇杆的铰链四杆机构. .(2)(2)运动特点运动特点: :由转动由转动 摆动或摆动摆动或摆动转动转动. .(3)(3)实例实例: :雷达天线雷达天线、鳄式破碎机、鳄式破碎机机械专业教研组应用:应用: 雷雷 达达 缝纫机缝纫机机械专业教研组机械专业教研组正平行双曲柄机构正平行双曲柄机构 反平行双曲柄机构反平行双曲柄机构(一) 机械专业教
5、研组(二)平行(二)平行双曲柄机构机构机构 平行平行双曲柄机构机构:在双曲柄机构中,若两曲柄的长度相等,在双曲柄机构中,若两曲柄的长度相等,且连杆与机架的长度也相等,则称为平行四边形机构。且连杆与机架的长度也相等,则称为平行四边形机构。 a.a.运动特点运动特点: :匀速转动匀速转动 匀速转动匀速转动 b.b.实例实例: :机车车辆联动机构机车车辆联动机构机械专业教研组运动不确定现象:运动不确定现象:机械专业教研组机械专业教研组机械专业教研组机械专业教研组 铰链四杆机构类型的判断(1 1)若满足)若满足 (a a)取最短构件为机架)取最短构件为机架双曲柄机构双曲柄机构 (b)(b)取最短构件邻
6、边为机架取最短构件邻边为机架曲柄摇杆机构曲柄摇杆机构 (c)(c)取最短构件对边为机架取最短构件对边为机架双摇杆机构双摇杆机构(2 2)若不满足)若不满足 则不论取那个构件为机架均为双摇杆机构。则不论取那个构件为机架均为双摇杆机构。lmin+lmaxl+llmin+lmaxl+l机械专业教研组机械专业教研组机械专业教研组四杆机构的演化演化过程:演化过程:(1 1)由曲柄摇杆机构,将)由曲柄摇杆机构,将CDCD无穷大,无穷大,C C点轨迹变成直线;点轨迹变成直线;(2 2)演化方法:将转动副)演化方法:将转动副移动副;移动副;(3 3)类型:)类型: a.a.偏心曲柄滑块机构偏心曲柄滑块机构 ,
7、e0 e0 偏距:曲柄转动偏距:曲柄转动中心距导路的距离。中心距导路的距离。 b.b.对心曲柄滑块机构,对心曲柄滑块机构,e=0e=0机械专业教研组 (4)(4)运动特点:转动运动特点:转动 往复移动往复移动(5 5)应用实例:汽车发动机)应用实例:汽车发动机(6 6)应用范围:广泛应用于活塞式内燃机、空气压缩机、)应用范围:广泛应用于活塞式内燃机、空气压缩机、自动送料机构自动送料机构。机械专业教研组类型类型对心曲柄滑块机构对心曲柄滑块机构 偏置曲柄滑块机构偏置曲柄滑块机构曲柄存在条件:曲柄存在条件:对心曲柄滑块机构:对心曲柄滑块机构:L L1 1LL2 2 偏置曲柄滑块机构:偏置曲柄滑块机构
8、:L1+eL2 曲柄滑块机构曲柄滑块机构工程应用工程应用机械专业教研组2.导杆机构(1 1)演化过程:演化过程:改变曲柄滑块中的机架而演化来的;改变曲柄滑块中的机架而演化来的;(2 2)演化方法:演化方法:改变曲柄滑块机构的机架改变曲柄滑块机构的机架, ,以构件以构件1 1为机架。为机架。1 1 2 21 1 2 2机械专业教研组(2)2)、类型、类型转动导杆机构转动导杆机构 摆动导杆机构摆动导杆机构L L1 1LL2 L L1 1L2 :机架长度:机架长度:曲柄长度:曲柄长度机械专业教研组(3)(3)、应用、应用牛头刨床机构牛头刨床机构 简易插床简易插床机械专业教研组3.摇块机构(1 1)演
9、化方法:演化方法:以构件以构件2 2为机架,可得摇块机构。为机架,可得摇块机构。(2 2)应用实例:应用实例:卡车车厢自动卸料机构卡车车厢自动卸料机构机械专业教研组机械专业教研组4.定块机构(1 1)演化方法:演化方法:以构件以构件3 3为机架,得到定块机构。为机架,得到定块机构。(2 2)应用实例:应用实例:手压抽水机手压抽水机机械专业教研组ABCDB1C1AD1.1.急回运动急回运动在在曲柄摇杆机构曲柄摇杆机构中,当曲柄与连杆两次共线时,摇杆中,当曲柄与连杆两次共线时,摇杆位于两个极限位置,简称极位。位于两个极限位置,简称极位。当曲柄以当曲柄以逆时针转过逆时针转过180180+时,摇杆从时
10、,摇杆从C1D位置位置摆到摆到C2D。 所花时间为所花时间为t1 , , 平均速度为平均速度为V1, ,那么有:那么有:/ )180(1t1211tCCV 曲柄摇杆机构曲柄摇杆机构 3D此两处曲柄之间的夹角此两处曲柄之间的夹角 称为称为极位夹角极位夹角。180180C2B2)180/(21CC机械专业教研组B1C1ADC2当曲柄以当曲柄以继续转过继续转过180180-时,摇杆从时,摇杆从C2D,置摆到置摆到C1D,所所花时间为花时间为t2 , ,平均速度为平均速度为V2 , ,那么有:那么有: 180180-/)180(2t因曲柄转角不同,故摇杆来回摆动的时间不一样,平均速度也不等。显然:显然
11、:t t1 1 tt2 2 V V2 2 V V1 1摇杆的这种特性称为摇杆的这种特性称为急回运动急回运动。用以下比值表示急回程度称称K为为行程速比系数行程速比系数。12VVK 18018021tt且且越大,越大,K值越大,急回性质越明显。值越大,急回性质越明显。 只要只要 0 , 就有就有 KK1所以可通过分析机构中是否存在以及的大小来判断机构是否有急回运动或运动的程度。11180KK设计新机械时,往往先给定设计新机械时,往往先给定K值,于是值,于是: 2212tCCV)180/(21CC121221tCCtCC机械专业教研组 2.四杆机构的运动特性(以曲柄摇杆机构为例,曲柄为原动件)(1
12、1)四杆机构的极限位置四杆机构的极限位置 当曲柄与连杆二次共线时,摇杆位于机构的最左或最右的位置。当曲柄与连杆二次共线时,摇杆位于机构的最左或最右的位置。(2 2)极位夹角(极位夹角() 从动件处于二个极限位置时,相对应的原动件曲柄所夹的锐角。从动件处于二个极限位置时,相对应的原动件曲柄所夹的锐角。 两个极限位置间,从动件的夹角两个极限位置间,从动件的夹角称为最大摆角。称为最大摆角。机械专业教研组试确定下列不同机构以曲柄为原动件时的极限位置?机械专业教研组(3 3)行程速比系数行程速比系数K K 从动件空回行程与工作行程的平均速度之比。从动件空回行程与工作行程的平均速度之比。讨论:讨论:a.
13、a. 00 K 1 K 1此时机构具有急回特性,此时机构具有急回特性, K K 急急回特性越显著。回特性越显著。 b. b. =0=0K=1K=1,此时机构无急回特性。,此时机构无急回特性。K=v2/v1=(180+)/ =(180-) =180(K-1)/ (K+1)机械专业教研组 试确定摆动导杆机构和曲柄滑块机构以曲柄为原 动件时是否存在急回特性?机械专业教研组 3.四杆机构的传力性能(1 1)压力角)压力角和传动角和传动角 压力角压力角 :作用于从动件上的力作用于从动件上的力F F与力作用点的绝对速度方向之与力作用点的绝对速度方向之间所夹的锐角,称为压力角用间所夹的锐角,称为压力角用表示
14、。表示。 传动角传动角 :它为压力角它为压力角的余角即的余角即+=90=90 F F的两个分力的两个分力 Fn=Fsin-引起摩擦力,有害分力引起摩擦力,有害分力 Ft=Fcos-有效分力有效分力讨论:讨论:() Fn传力性能差。传力性能差。 ( ) Fn 传力性能好。传力性能好。机械专业教研组机械专业教研组 为保证机构的传力性能良好,必须限定机构的最小传动角,对于一为保证机构的传力性能良好,必须限定机构的最小传动角,对于一般机械,通常般机械,通常minmin4040 5050,大功率机械大功率机械minmin应大些,而小功率的应大些,而小功率的minmin可可取小些。取小些。 minmin的
15、确定的确定 a.a.曲柄摇杆机构的曲柄摇杆机构的minmin位置:摇杆位置:摇杆CDCD为从动件,曲柄为从动件,曲柄ABAB为原动为原动时,当原动件时,当原动件ABAB与机架与机架ADAD共线时,传动角最小。比较两者两次共线的共线时,传动角最小。比较两者两次共线的minmin,并取小值为该机构的最小传动角,并取小值为该机构的最小传动角minmin 。机械专业教研组曲柄摇杆机构的min位置机械专业教研组 b. b.对于曲柄滑块机构,当主动件为曲柄时,最小传动角出现在曲对于曲柄滑块机构,当主动件为曲柄时,最小传动角出现在曲柄与机架垂直的位置。柄与机架垂直的位置。 c.c.对于摆动导杆机构由于在任何
16、对于摆动导杆机构由于在任何位置时主动曲柄通过滑块传给从动件位置时主动曲柄通过滑块传给从动件的力的方向,与从动件上受力点的速的力的方向,与从动件上受力点的速度方向始终一致,所以传动角等于度方向始终一致,所以传动角等于9090度。度。机械专业教研组(2 2)死点位置)死点位置 死点位置(死点位置(曲柄摇杆机构曲柄摇杆机构) 平面连杆机构的传动角平面连杆机构的传动角=0=0,压力角,压力角=90=90度的位置称为死点位置。度的位置称为死点位置。 死点位置的利弊死点位置的利弊 利:工程上利用死点位置进行工作。利:工程上利用死点位置进行工作。 实例一:实例一:飞机起落架飞机起落架 实例二:实例二:夹具机
17、构夹具机构 弊:机构有死点,从动件出现卡死或运动方向不确定现象,对传动不弊:机构有死点,从动件出现卡死或运动方向不确定现象,对传动不利。利。 克服死点的方法克服死点的方法 (a a)增大从动件的质量,利用惯性度过死点位置。)增大从动件的质量,利用惯性度过死点位置。 实例:实例:缝纫机脚踏板机构缝纫机脚踏板机构 (b b)在从动曲柄上施加外力或安装飞轮以增加惯性。)在从动曲柄上施加外力或安装飞轮以增加惯性。机械专业教研组死点位置(死点位置(曲柄摇杆机构曲柄摇杆机构)机械专业教研组学习提要(一)1.1.了解相关的基本概念:平面连杆机构、四杆机构、铰链四了解相关的基本概念:平面连杆机构、四杆机构、铰链四杆机构、曲柄、连杆、连架杆、摇杆杆机构、曲柄、连杆、连架杆、摇杆2.2.掌握铰链四杆机构的基本类型及应用实例;掌握铰链四杆机构的基本类型及应用实例;
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 《GB-T 40604-2021新能源场站调度运行信息交换技术要求》专题研究报告
- 《GBT 35796-2017 养老机构服务质量基本规范》专题研究报告
- 《GB-T 17215.941-2012电测量设备 可信性 第41部分:可靠性预测》专题研究报告
- 2026年河南省驻马店地区单招职业倾向性考试题库及参考答案详解一套
- 云计算信息服务合同
- 智能电网工程师岗位招聘考试试卷及答案
- 2025年休闲健身服务项目发展计划
- 排尿异常护理查房
- 辽宁省2025秋九年级英语全册Unit5Whataretheshirtsmadeof课时1SectionA(1a-2d)课件新版人教新目标版
- 员工成长路径
- DB32T 5124.3-2025 临床护理技术规范 第3部分:成人危重症患者有创动脉血压监测
- 松陵一中分班试卷及答案
- 《小米广告宣传册》课件
- 劳务派遣公司工作方案
- 物理趣味题目试题及答案
- 华师大版数学七年级上册《4.3 立体图形的表面展开图》听评课记录
- 2023-2024学年四川省成都市高二上学期期末调研考试地理试题(解析版)
- 陕西单招数学试题及答案
- 应收账款债权转让协议
- 四川省宜宾市长宁县2024-2025学年九年级上学期期末化学试题(含答案)
- 可行性报告商业计划书
评论
0/150
提交评论