



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、机械设计基础机械设计基础 平面连杆机构平面连杆机构v平面连杆机构:平面连杆机构:所有构件都是用低副连接组成的平所有构件都是用低副连接组成的平面机构。面机构。v平面连杆机构的特点:平面连杆机构的特点:运动副为面接触、承载大、不易磨损,寿命长;运动副为面接触、承载大、不易磨损,寿命长;接触面为圆柱面或平面,易加工,容易获得较高的制造精度,加工接触面为圆柱面或平面,易加工,容易获得较高的制造精度,加工成本低;成本低;能实现较复杂的运动及较大的行程;能实现较复杂的运动及较大的行程;构件和运动副较多,有积累误差,机械效率较低;构件和运动副较多,有积累误差,机械效率较低;惯性力难以平衡惯性力难以平衡,不宜
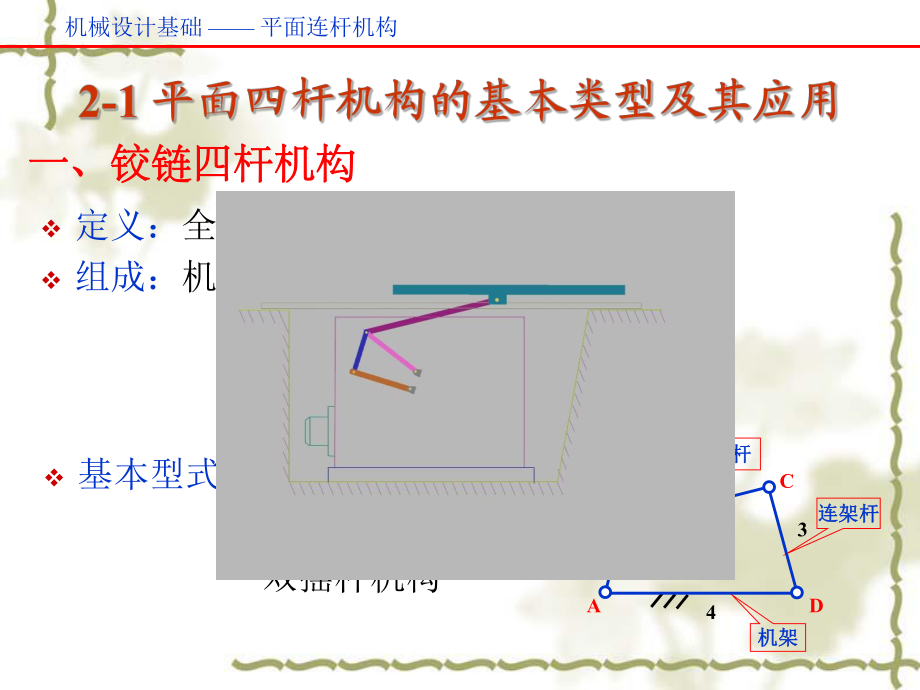
2、用于高速传动;不宜用于高速传动;较难准确实现预定的连续的运动规律,设计方法复杂。较难准确实现预定的连续的运动规律,设计方法复杂。2-1 平面四杆机构的基本类型及其应用2-2 平面四杆机构的基本特性2-3 平面四杆机构的设计机械设计基础 平面连杆机构v定义:全部用转动副相连的平面四杆机构。v组成:机架、连杆、连架杆一、铰链四杆机构一、铰链四杆机构连杆连杆连架杆连架杆连架杆连架杆机架机架1234ABCD曲柄曲柄摇杆摇杆( (摆杆摆杆) )( (周转副周转副) )( (摆转副摆转副) )v基本型式:曲柄摇杆机构 双曲柄机构 双摇杆机构1、曲柄摇杆机构、曲柄摇杆机构v结构特点:结构特点:连架杆连架杆1
3、为曲柄,为曲柄,3为摇杆为摇杆v运动变换:运动变换:转动转动摇动摇动机械设计基础 平面连杆机构2、双曲柄机构、双曲柄机构v结构特点:结构特点:二连架杆均为曲柄二连架杆均为曲柄v运动变换:运动变换: 转动转动转动,通常二转速不相等转动,通常二转速不相等机械设计基础 平面连杆机构特殊双曲柄机构特殊双曲柄机构机械设计基础 平面连杆机构特殊双曲柄机构特殊双曲柄机构机械设计基础 平面连杆机构3、 双摇杆机构双摇杆机构 v结构特点:结构特点:二连架杆均为摇杆二连架杆均为摇杆v运动变换:运动变换:摆动摆动摆动摆动机械设计基础 平面连杆机构二、含一个移动副的四杆机构二、含一个移动副的四杆机构铰链四杆机构铰链四
4、杆机构曲线导轨曲柄滑块机构曲线导轨曲柄滑块机构lCD 偏置式曲柄滑块机构偏置式曲柄滑块机构对心式曲柄滑块机构对心式曲柄滑块机构对对CDCD杆等效转化杆等效转化转动副变成移动副转动副变成移动副机械设计基础 平面连杆机构e 01 1、曲柄滑块机构、曲柄滑块机构2、导杆机构、导杆机构A41B2C3曲柄滑块机构曲柄滑块机构作机架作机架 A41B2C3导杆机构导杆机构转动导杆机构转动导杆机构lBC lAB,导杆导杆AC整周转动整周转动C234C234AB1lBC lAB,导杆导杆AC整周转动整周转动C234C234AB1lBC lAB,导杆导杆AC摆动摆动摆动导杆机构摆动导杆机构23C432C4AB1机
5、械设计基础 平面连杆机构二、急回特性二、急回特性机械设计基础 平面连杆机构 回程的运动速度大于工回程的运动速度大于工作行程的运动速度的运动作行程的运动速度的运动状况,称为状况,称为急回运动特性。急回运动特性。 行程速比系数行程速比系数K K 12vvK 11180 KK极位夹角:极位夹角: 从动件处于从动件处于极限位置时对应的主动件位极限位置时对应的主动件位置的夹角。置的夹角。 1 B2C2 1 2v2v1B1C14ABCD231002121121221180180/tttCCtCC 三、压力角与传动角三、压力角与传动角机械设计基础 平面连杆机构 压力角:压力角:从动件所受到的驱动力方向与该力
6、作用点的绝从动件所受到的驱动力方向与该力作用点的绝对速度方向之间所夹的锐角。对速度方向之间所夹的锐角。 传动角:传动角:压力角的余角。压力角的余角。FnFtF ABCDv4123 思考:最小传动角如何确定,它会出现在什么位置?思考:最小传动角如何确定,它会出现在什么位置?机械设计基础 平面连杆机构四、死点位置四、死点位置传动角为零传动角为零( (连杆与从动件共线)的位置。连杆与从动件共线)的位置。FF死点位置的不良影响:死点位置的不良影响:1 1、卡死现象、卡死现象2 2、运动的不确定性、运动的不确定性1 1、施加外力、施加外力2 2、利用构件惯性、利用构件惯性克服死点的措施克服死点的措施:
7、: vv机械设计基础 平面连杆机构死点的利用死点的利用机械设计基础 平面连杆机构铰链四杆机构的组成和类型铰链四杆机构的组成和类型铰链四杆机构有曲柄的条件铰链四杆机构有曲柄的条件铰链四杆机构的基本特性铰链四杆机构的基本特性急回运动急回运动特性特性压力角与传压力角与传动角动角死点位置死点位置小结:小结:铰链四杆机构的基本类型和特性铰链四杆机构的基本类型和特性 1 实现刚体的导引实现刚体的导引 机构能引导刚体(如连杆)通过一系列给定位置机构能引导刚体(如连杆)通过一系列给定位置 2 实现给定的运动规律实现给定的运动规律 给定行程速比变化系数给定行程速比变化系数 3 实现预定轨迹实现预定轨迹 连杆上某
8、点通过某一预定连杆上某点通过某一预定 轨迹的功能轨迹的功能 图解法、解析法、实验法图解法、解析法、实验法1)给定连杆两个位置设计铰链四杆机构根据已知条件,绘出连杆的两个位置根据已知条件,绘出连杆的两个位置B1C1、B2C2;连接连接B1B2、C1C2 ,并分别作它们的垂直平,并分别作它们的垂直平分线分线 ; 在其垂直平分线上分别在其垂直平分线上分别任取任取两点两点A、D(一(一般也可根据其它辅助条件选取);般也可根据其它辅助条件选取);连接连接AB1C1D 即为所求四杆机构的一个位置;即为所求四杆机构的一个位置; 注意:注意:在给定连杆的两个位置要求设计四杆机构时,由于在给定连杆的两个位置要求
9、设计四杆机构时,由于A A、D D两点可在和两点可在和 上任意选取,因此可得无穷多组解。一般还应该考虑其他辅助条件,例上任意选取,因此可得无穷多组解。一般还应该考虑其他辅助条件,例如,满足合理的结构要求,使机械在运转中的最小传动角最大,等等。如,满足合理的结构要求,使机械在运转中的最小传动角最大,等等。B2C2ADADB1C1机械设计基础机械设计基础 平面连杆机构平面连杆机构1 1、实现刚体导引、实现刚体导引v绘出连杆已知的三绘出连杆已知的三个位置。个位置。v用三点定心法确定用三点定心法确定两固定铰链两固定铰链D,C2)给定连杆三个位置设计四杆机构IIIIIIB1B2B3C2C3C1DA注意:
10、注意:v三点唯一确定一个圆三点唯一确定一个圆,故确定故确定B、C点后,固定铰链点后,固定铰链A、D也唯一确定也唯一确定机械设计基础机械设计基础 平面连杆机构平面连杆机构按给定的行程速比系数设计四杆机构按给定的行程速比系数设计四杆机构1)曲柄摇杆机构已知:已知:CD杆长,摆角杆长,摆角及及K,设计该机构步骤如下:,设计该机构步骤如下:计算计算180(K-1)/(K+1);任取一点任取一点D,作腰长为,作腰长为CD的等的等腰三角形,夹角为腰三角形,夹角为;作作C1FC1C2,作,作C2F使使:C1C2F=90-,两线交于两线交于F;作作F C1C2的外接圆,的外接圆,A点必点必在此圆上;在此圆上;
11、选定选定A,AC1l2-l1,AC2=l2+l1。2)曲柄滑块机构已知已知 K,滑块行程,滑块行程 H,偏距,偏距e,设计此机构。,设计此机构。计算计算180(K-1)/(K+1);作作C1 C2 H ; 作 射 线作 射 线 C2M , 使, 使C1C2M=90 -作射线作射线C1N垂直于垂直于C1C2,两条射两条射线交于线交于P点点 ; 以以C2P为直径作圆;为直径作圆;AC1l2-l1,AC2=l2+l1。作与作与C1 C2平行且偏距为平行且偏距为e的直的直线,交圆于线,交圆于A或或A;3)导杆机构分析:由于分析:由于与导杆摆角与导杆摆角相等,设计相等,设计此机构时,仅需要确定曲柄此机构时,仅需要确定曲柄AB长度。长度。计算计算180(K-1)/(K+1);任选任选C作作mCn,作其作其角平分线,即机架角平分线,即机架AC所在直线所在直线;取取A点,使得点,使得AC=d;已知:机
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2025年黄石市阳新县事业单位招聘考试试题【答案】
- 市部分事业单位招聘199人笔试模拟试题参考答案详解
- 建筑施工技术课后思考题习题及答案
- 工厂搬迁安全培训课件
- 2025三基三严培训试卷及答案
- 2025年石油石化职业技能鉴定试题及答案:机车司机
- 2025年全省职业技能竞赛(人工智能训练师赛项)备赛试题库及答案
- 2025年唐山市迁安市保安员招聘考试题库附答案解析
- 2025年及未来5年中国长途客车市场竞争态势及行业投资前景预测报告
- 雨课堂学堂在线学堂云《储层表征与建模(中石)》单元测试考核答案
- NB-T31045-2013风电场运行指标与评价导则
- 三减三健健康知识讲座
- 中华民族共同体概论课件第十六讲文明新路与人类命运共同体
- 心灵航标:带你感悟延安精神智慧树知到期末考试答案2024年
- 高中会考历史模拟试卷及参考答案
- 小班综合《积木娃娃本领大》课件
- 交通中国智慧树知到期末考试答案2024年
- 2024年浙江杭州西湖云创集团有限公司招聘笔试参考题库附带答案详解
- 供电企业舆情的预防及处置
- 《汉字的结构特点》课件
- 四川省巴中市2023-2024学年五年级上学期期末数学试卷
评论
0/150
提交评论