


下载本文档
版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、步进电机细分控制原理时间:2011-11-24来源:作者:关键字:步进电机控制原理步进电机控制已经蕴含了细分的原理。电机内部磁场每旋转一个圆周,步进电机前进一整个步距角。若四相步进电机按Af Bf Cf D fA的顺序轮流通电,即整步工作,磁场分四拍旋转,每次电流换向,步进电机将前进整步距角的 1/4。而按A f AB fB f BCf Cf CD f DfDAf A的顺序轮流通电,即半步工作,每次电流换向,步进电机将前进整步距角的 1/8。但是,如果半步工作状态下每拍前进的角度超过控制精度要求,则需要对步距角进行更进一步的细分。我们知道,电磁力的大小跟绕组通电电流的大小是相关的。当通电相的电
2、流不马上到达峰值,而断电相的电流也不立即降为零时,电机内部磁场为上两相电流共同合成,而产生的磁场合力,会使转子有一个新的平衡位置,这个新的平衡位置在原步距角的范围内。也就是说,如果绕组电流的波形不再是一个近似方波,而是分成N个阶梯的近似阶梯波,则电流每升或者降一个阶梯时转子转动一小步。当转子按照这个规律转过N小步时,实际相当于它转过一个步距角。这种将一个步距角分成若干小步的驱动方法,称为细分驱动。如图3: T1是一个高频开关管。T2管的发射极接一个电流取样小电阻 R。比较器一端接给定电压 uc,另一端接R上的压降。控 制脉冲ui为低电平时,T1和T2均截止。当ui为高电平时,T1和T2均导通,
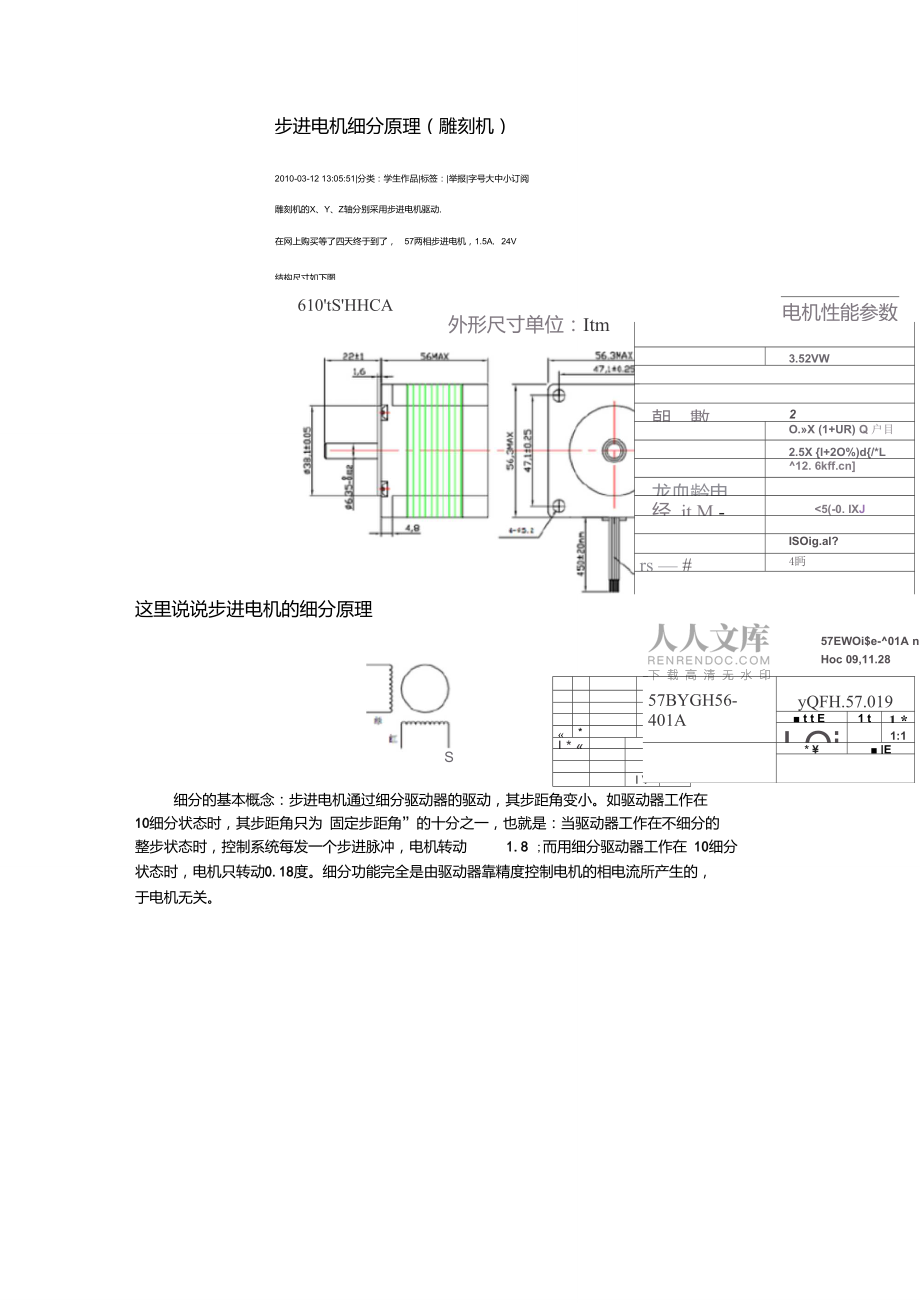
3、电源向电机供电。由于绕组电感的作用,R上电压逐渐升 高,当超过给定电压uc,比较器输出低电平,与门因此输出低电平,T1截止,电源被切断,绕组电感放电。当取样电阻上的电压小于给定电压时,比较器又输出高电平,与门输出高电平T1又导通,电源又开始向绕组供电,这样反复循环,直到ui又为低电平。因此:T2每导通一次,T1导通多次,绕组的电流波形为锯齿形 如图4所示,在T2导通的时间里电源是脉冲式供电 (图4中ua波形),所以提高了电源效率,而且还能有效抑制共振。ftS 3新液动电腐圈步进电机细分原理(雕刻机)2010-03-12 13:05:51|分类:学生作品|标签:|举报|字号大中小订阅雕刻机的X、
4、Y、Z轴分别采用步进电机驱动,在网上购买等了四天终于到了,57两相步进电机,1.5A, 24V结构尺寸如下图610tSHHCA外形尺寸单位:Itm电机性能参数3.52VW朝數2O.X (1+UR) Q 户目2.5X l+2O%)d/*L12. 龙血齢电经 it M -5(-0. IXJISOig.al?rs #4眄S57EWOi$e-01A n Hoc 09,11.28*11 L* I V57BYGH56-401AyQFH.57.019 t t E1 t1 *LOjJ1:1* |E这里说说步进电机的细分原理细分的基本概念:步进电机通过细分驱动器的驱动,其步距角变小。如驱动器工作在10细分状态时
5、,其步距角只为 固定步距角”的十分之一,也就是:当驱动器工作在不细分的 整步状态时,控制系统每发一个步进脉冲,电机转动1.8 ;而用细分驱动器工作在 10细分状态时,电机只转动0.18度。细分功能完全是由驱动器靠精度控制电机的相电流所产生的, 于电机无关。为两相步进电机的工作原理示意图,它有 2个绕组A和B。当一个绕组通 电后,其定子磁极产生磁场,将转子吸合到此磁极处。IMBZB图2 4细份时电机b B线圈电盘在不同角度的分配比例若绕组在控制脉冲的作用下,通电方向顺序按照:这四个状态周而复始进行变化,电机可顺时针转动;控制脉冲每作用一次,通电 方向就变化一次,使电机转动一步,即 90度。4个脉
6、冲,电机转动一圈。细分驱动器的原理是通过改变 A, B相电流的大小,以改变合成磁场的夹角,从 而可将一个步距角细分为多步。当 A、B相绕组同时通电时,转子将停在 A、B 相磁极中间,如图1 (b),( d)所示。若通电方向顺序按照:这8个状态周而复始进行变化,电机顺时针转动;电机每转动一步,为 45度,8 个脉冲电机转一周。与通电顺序(1)相比,它的步距角小了一半。为了保证电机输出的力矩均匀,A、B相线圈电流的大小也要调整,使 A、B相产 生的合力在每个位置相同。图2所示为电机四细分时,A、B相线圈电流的比例。A、B相线圈电流大小与转角关系如图 3所示。图2 4细分时电机A、B线圈电流在不同角
7、度的分配比例从图3中可以看出,步进电机的相电流是按正弦函数(如虚线所示)分布的;细 分数越大,相电流越接近正弦曲线。2.步进电机细分与电机运动平稳性的关系被测步进电机步距角为1.8度,即无细分时每转200步。试验时,将步进电机转 速都设为2 r/s ;电机2细分时,电机每转400步,每步周期为1.25ms;电机8 细分时,电机每转1600步,每步周期为0.3125ms;电机64细分时,电机每转 12800步,每步周期为0.0391ms。步进电机2细分时,电流波形台阶均匀,且电流脉动值很大,其最大值是最大电流的70.7 %;步进电机8细分时,电流波形台阶明显,但电流脉动值较小, 其最大值是最大电
8、流的19.5 %;步进电机64细分时,电流波形较平滑,电流波 形已很难分辨分别出台阶的个数,最大电流脉动值仅为最大电流的 2.45 %。由电磁感应定理知,步进电机输出力矩和电机线圈的电流成正比,及:T = KT X i式中KT为电机力矩常数,它与电机结构、材料、线圈长度等因素有关。由此公式就很容易理解:步进电机细分数越高,电机运转越平稳;步进电机细分 数越小,电机运转时振动越大。因为细分数高时,电流曲线光滑,所以电机输出 力矩也就波动小连续、电机运行就平稳;电机细分数小,电机电流脉动就大,其 输出力矩脉动就大,因而造成电机较大的振动,该振动并产生噪音乃至其它部件 的谐振噪音。3.结论步进电机细分驱动电路不但可以提高工作平台的运动平稳性, 而且可以有效 地提高工作平台的定位精
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2025年广东省河源市辅警考试题《公安基础知识》综合能力试题库附答案
- 2025年广东省辅警招聘《公安基础知识》真题及答案解析
- 山西省农村信用社联合社秋季校园招聘笔试备考题库(浓缩500题)及答案详解(基础+提升)
- 2026年北京市农村信用社联合社秋季校园招聘笔试备考题库(浓缩500题)含答案详解(培优a卷)
- 山西省农村信用社联合社秋季校园招聘笔试备考题库(浓缩500题)含答案详解(轻巧夺冠)
- 2025年高校教师职业道德题库带答案(达标题)
- 湖州市农村信用社联合社秋季校园招聘笔试备考题库(浓缩500题)及答案详解(典优)
- 齐齐哈尔市农村信用社联合社秋季校园招聘笔试备考题库(浓缩500题)附答案详解(研优卷)
- 2025年云南省特种作人员取证培训以及特种设备作业人员取证培训考试继电保护作业复习题及答案
- 佳木斯市农村信用社联合社秋季校园招聘笔试备考题库(浓缩500题)附答案详解(培优a卷)
- GB/T 42698-2023纺织品防透视性能的检测和评价
- 髋臼及股骨骨缺损的分型及评价-课件
- 物流统计与实务PPT完整版全套教学课件
- 肿瘤病人高钙血症的文献阅读
- 减少老年住院患者口服药缺陷次数的pdca案例
- 普通心理学感觉和知觉蔡笑岳
- 护理安全警示教育
- 草诀百韵歌原文及译文
- GB/T 12970.4-2009电工软铜绞线第4部分:铜电刷线
- 2023年兴海县社区工作者招聘考试笔试题库及答案解析
- 3.3数据与系统(第二课时) (1) 课件-高中信息技术必修1
评论
0/150
提交评论