

版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
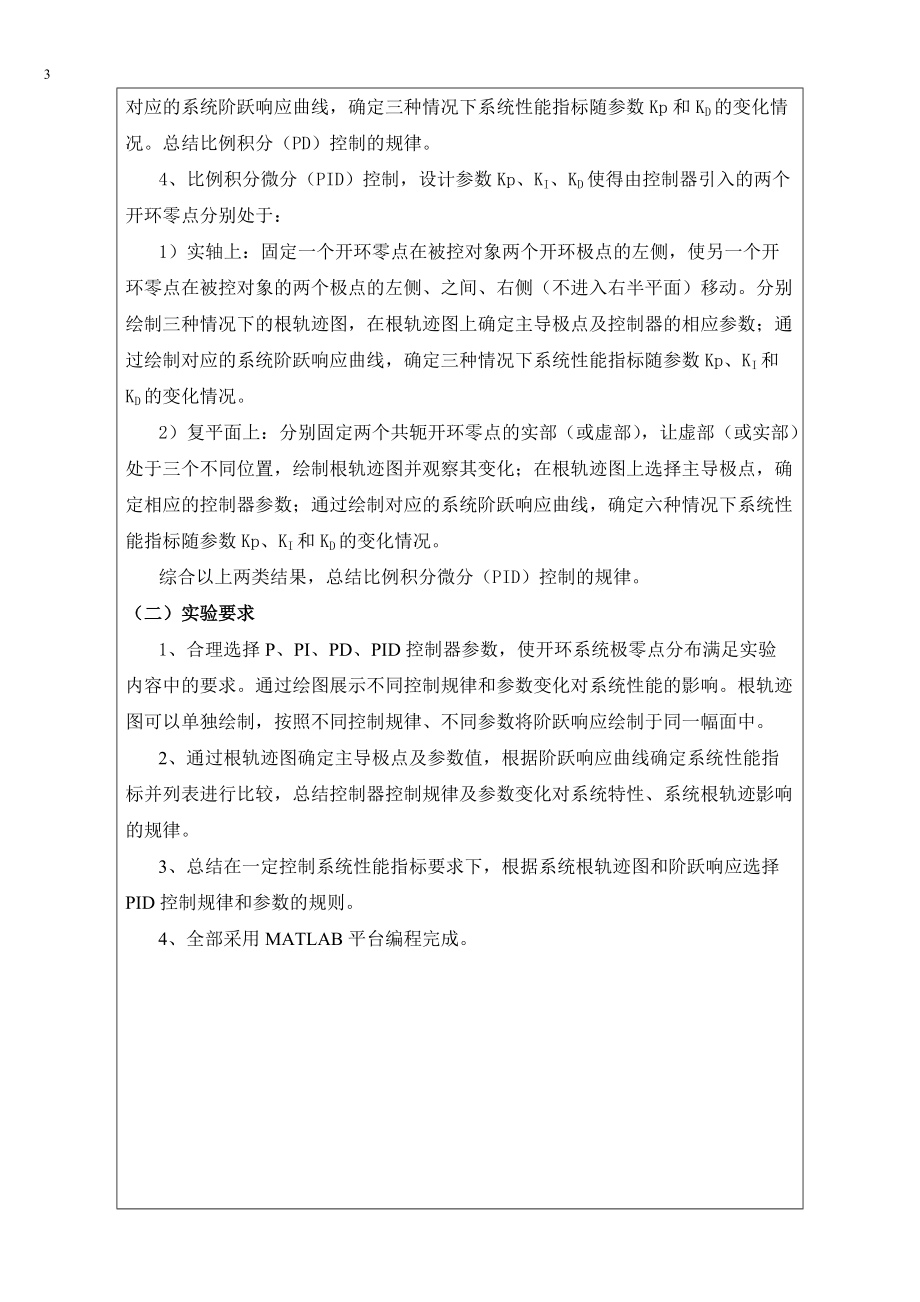
1、282013-2014 学年第 1 学期 院 别: 控制工程学院 课程名称: 自动控制原理 实验名称: PID控制特性的实验研究 实验教室: 6111 指导教师: 小组成员(姓名,学号): 实验日期: 2013 年 12 月 12 日 评 分:一、实验目的1、学习并掌握利用MATLAB编程平台进行控制系统复数域和时域仿真的方法;2、通过仿真实验,学习并掌握应用根轨迹分析系统性能及根据系统性能选择系统参数的方法;3、通过仿真实验研究,总结PID控制规律及参数变化对系统性能影响的规律。二、实验任务及要求(一)实验任务针对如图所示系统,设计实验及仿真程序,研究在控制器分别采用比例(P)、比例积分(P
2、I)、比例微分(PD)及比例积分微分(PID)控制规律和控制器参数(Kp、KI、KD)不同取值时,控制系统根轨迹和阶跃响应的变化,总结PID控制规律及参数变化对系统性能、系统根轨迹、系统阶跃响应影响的规律。具体实验内容如下:1、比例(P)控制,设计参数Kp使得系统处于过阻尼、临界阻尼、欠阻尼三种状态,并在根轨迹图上选择三种阻尼情况的Kp值,同时绘制对应的阶跃响应曲线,确定三种情况下系统性能指标随参数Kp的变化情况。总结比例(P)控制的规律。2、比例积分(PI)控制,设计参数Kp、KI使得由控制器引入的开环零点分别处于:1)被控对象两个极点的左侧;2)被控对象两个极点之间;3)被控对象两个极点的
3、右侧(不进入右半平面)。分别绘制三种情况下的根轨迹图,在根轨迹图上确定主导极点及控制器的相应参数;通过绘制对应的系统阶跃响应曲线,确定三种情况下系统性能指标随参数Kp和KI的变化情况。总结比例积分(PI)控制的规律。3、比例微分(PD)控制,设计参数Kp、KD使得由控制器引入的开环零点分别处于:1)被控对象两个极点的左侧;2)被控对象两个极点之间;3)被控对象两个极点的右侧(不进入右半平面)。分别绘制三种情况下的根轨迹图,在根轨迹图上确定主导极点及控制器的相应参数;通过绘制对应的系统阶跃响应曲线,确定三种情况下系统性能指标随参数Kp和KD的变化情况。总结比例积分(PD)控制的规律。4、比例积分
4、微分(PID)控制,设计参数Kp、KI、KD使得由控制器引入的两个开环零点分别处于:1)实轴上:固定一个开环零点在被控对象两个开环极点的左侧,使另一个开环零点在被控对象的两个极点的左侧、之间、右侧(不进入右半平面)移动。分别绘制三种情况下的根轨迹图,在根轨迹图上确定主导极点及控制器的相应参数;通过绘制对应的系统阶跃响应曲线,确定三种情况下系统性能指标随参数Kp、KI和KD的变化情况。2)复平面上:分别固定两个共轭开环零点的实部(或虚部),让虚部(或实部)处于三个不同位置,绘制根轨迹图并观察其变化;在根轨迹图上选择主导极点,确定相应的控制器参数;通过绘制对应的系统阶跃响应曲线,确定六种情况下系统
5、性能指标随参数Kp、KI和KD的变化情况。综合以上两类结果,总结比例积分微分(PID)控制的规律。(二)实验要求1、合理选择P、PI、PD、PID控制器参数,使开环系统极零点分布满足实验内容中的要求。通过绘图展示不同控制规律和参数变化对系统性能的影响。根轨迹图可以单独绘制,按照不同控制规律、不同参数将阶跃响应绘制于同一幅面中。2、通过根轨迹图确定主导极点及参数值,根据阶跃响应曲线确定系统性能指标并列表进行比较,总结控制器控制规律及参数变化对系统特性、系统根轨迹影响的规律。3、总结在一定控制系统性能指标要求下,根据系统根轨迹图和阶跃响应选择PID控制规律和参数的规则。4、全部采用MATLAB平台
6、编程完成。三、实验方案设计(含实验参数选择、控制器选择、仿真程序等)1、比例控制(1)过阻力a、取k为3和2b、控制器选择c,仿真的程序k1=14;k2=15;num1=k1;num2=k2;den1=1 8 k1;den2=1 8 k2;sys1=tf(num1, den1);sys2=tf(num2, den2);t=0:0.1:10;step(sys1,t);hold on;step(sys2,t);xlabel('Time(s)')ylabel('step reponse y(t)')2、 临界阻力a、 取k为4b、 控制器选择c、仿真的程序k1=16;
7、num1=k1;den1=1 8 k1;sys1=tf(num1, den1);t=0:0.1:10;step(sys1,t);hold on;xlabel('Time(s)')ylabel('step reponse y(t)')3、 欠阻力a、 k取168和138b、 控制系统选择c、仿真的程序k1=180;k2=150;num1=k1;num2=k2;den1=1 8 k1;den2=1 8 k2;sys1=tf(num1, den1);sys2=tf(num2, den2);t=0:0.1:10;step(sys1,t);hold on;step(sys
8、2,t);xlabel('Time(s)')ylabel('step reponse y(t)')2、 比例积分控制(1) 引入开环零点在被控对象两个极点的左侧a、 取KP为2,KI为16b、控制器选择c、根轨迹的仿真程序num=2 16;den=1 8 12 0;sys=tf(num,den);rlocus(sys)rlocfind(sys)d、阶跃响应的仿真程序num=2 16;den=1 8 14 16;sys=tf(num, den);t=0:0.1:10;step(sys,t);hold on;xlabel('Time(s)')ylab
9、el('step reponse y(t)')(2) 、引入开环零点在被控对象两个极点之间a、 kp取值为2,kI取值为8b、 控制器选择c、d、 根轨迹的仿真程序num=2 8;den=1 8 12 0;sys=tf(num,den);rlocus(sys)rlocfind(sys)d、阶跃响应的仿真程序num=2 8;den=1 8 14 8;sys=tf(num, den);t=0:0.1:10;step(sys,t);hold on;xlabel('Time(s)')ylabel('step reponse y(t)')(3) 引入开环零
10、点在被控对象两个极点的右侧(不进入右半平面)。a、 Kp取2, KI取2b、 控制器选择c、 根轨迹的仿真程序num=2 2;den=1 8 12 0;sys=tf(num,den);rlocus(sys)rlocfind(sys)d、 阶跃响应的仿真程序num=2 2;den=1 8 14 2;sys=tf(num, den);t=0:0.1:60;step(sys,t);hold on;xlabel('Time(s)')ylabel('step reponse y(t)')3、比例微分(PD)控制,设计参数Kp、KD使得由控制器引入的开环零点分别处于:(1)
11、引入开环零点在被控对象两个极点的左侧a、Kp取为16,KD取为2b、控制器的选择 c、根轨迹的仿真程序num=2 16;den=1 8 12;sys=tf(num,den);rlocus(sys)rlocfind(sys)d、阶跃响应的仿真程序num=2 16;den=1 10 28;sys=tf(num, den);t=0:0.1:10;step(sys,t);hold on;xlabel('Time(s)')ylabel('step reponse y(t)')(2) 、引入开环零点在被控对象两个极点之间a、 KP取为8,KD取为2b、 控制器的选择c、 根
12、轨迹的仿真程序num=2 8;den=1 8 12;sys=tf(num,den);rlocus(sys)rlocfind(sys)d、阶跃响应的仿真程序num=2 8;den=1 10 20;sys=tf(num, den);t=0:0.1:5;step(sys,t);hold on;xlabel('Time(s)')ylabel('step reponse y(t)')(3) 、引入开环零点在被控对象两个极点的右侧(不进入右半平面)a、 KP取为2, KD取为2b、 控制器的选择c、 根轨迹的仿真程序num=2 2;den=1 8 12;sys=tf(num
13、,den);rlocus(sys)rlocfind(sys)d、 阶跃响应的仿真程序num=2 2;den=1 10 14;sys=tf(num, den);t=0:0.1:10;step(sys,t);hold on;xlabel('Time(s)')ylabel('step reponse y(t)')4、比例积分微分(PID)控制,设计参数Kp、KI、KD使得由控制器引入的两个开环零点分别处于:(1)实轴上:固定一个开环零点在被控对象两个开环极点的左侧,使另一个开环零点在被控对象的两个极点的左侧a、取Kp为17, KI为72, KD为1b、控制器的选择c、
14、阶跃响应的仿真程序num=1 17 72;den=1 9 29 72;sys=tf(num, den);t=0:0.1:10;step(sys,t);hold on;xlabel('Time(s)')ylabel('step reponse y(t)')d、根轨迹仿真程序num=1 17 72;den=1 8 12 0;sys=tf(num,den);rlocus(sys)rlocfind(sys)(2) 实轴上:固定一个开环零点在被控对象两个开环极点的左侧,使另一个开环零点在被控对象的两个极点的之间a、 取KP为12,KD为1, KI为32b、 控制器的选择c
15、、 阶跃响应仿真程序num=1 12 32;den=1 9 24 32;sys=tf(num, den);t=0:0.1:10;step(sys,t);hold on;xlabel('Time(s)')ylabel('step reponse y(t)')d、 根轨迹仿真程序num=1 12 32;den=1 8 12 0;sys=tf(num,den);rlocus(sys)rlocfind(sys)(3) 实轴上:固定一个开环零点在被控对象两个开环极点的左侧,使另一个开环零点在被控对象的两个极点的右侧(不进入右半平面)a、 取KD为1, KI为8, KP 为
16、9b、 控制器的选择c、 阶跃响应仿真程序num=1 9 8;den=1 9 21 8;sys=tf(num, den);t=0:0.1:60;step(sys,t);hold on;xlabel('Time(s)')ylabel('step reponse y(t)')d、 根轨迹仿真程序num=1 9 8;den=1 8 12 0;sys=tf(num,den);rlocus(sys)rlocfind(sys)(4) 复平面上:分别固定两个共轭开环零点的实部(或虚部),让虚部(或实部)处于三个不同位置,绘制根轨迹图并观察其变化a、 取KP为5, KD为4,
17、KI为3b、 控制器选择c、 阶跃响应仿真程序num=4 5 3;den=1 12 17 3;sys=tf(num, den);t=0:0.1:100;step(sys,t);hold on;xlabel('Time(s)')ylabel('step reponse y(t)')d、 根轨迹仿真程序num=4 5 3;den=1 8 12 0;sys=tf(num,den);rlocus(sys)rlocfind(sys)a、 取KP为5, KD为4, KI为6b、 控制器的选择c、 阶跃响应仿真程序num=4 5 6;den=1 12 17 6;sys=tf(
18、num, den);t=0:0.1:100;step(sys,t);hold on;xlabel('Time(s)')ylabel('step reponse y(t)')d、 根轨迹仿真程序num=4 5 6;den=1 8 12 0;sys=tf(num,den);rlocus(sys)rlocfind(sys)a、 取KP为5, KD为4, KI为10b、 控制器的选择c、 阶跃响应仿真程序num=4 5 10;den=1 12 17 10;sys=tf(num, den);t=0:0.1:100;step(sys,t);hold on;xlabel(&#
19、39;Time(s)')ylabel('step reponse y(t)')d、 根轨迹仿真程序num=4 5 10;den=1 8 12 0;sys=tf(num,den);rlocus(sys)rlocfind(sys)四、实验结果(含仿真曲线、数据记录表格、实验结果数据表格及实验分析与结论等)1、比例控制a、过阻力仿真曲线数据记录上升时间调节时间超调量峰值时间0.9161.60%10b、临界阻力仿真曲线数据记录上升时间调节时间超调量峰值时间0.8641.460%9.89c、欠阻力上升时间调节时间超调量峰值时间0.1380.98831.9%0.3d、实验分析与结论
20、K值越小,上升时间越短;调节时间越长;超调量越小;峰值时间越长。当k值使系统处于欠阻力时,系统振荡的比较厉害调节时间会比较长。当k值使系统处于临界阻力时,调节时间 会比较短,超调量也很小,或几乎为0。当k值使系统处于过阻力时,调节时间会稍微有点长,且几乎无超调量。2、比例积分控制(1)引入零点在被控对象两个极点的左侧阶跃响应的仿真曲线数据记录上升时间调节时间超调量峰值时间1.143.810.8%2.4根轨迹的仿真曲线(2) 引入开环零点在被控对象两个极点之间根轨迹仿真曲线阶跃响应仿真图数据记录上升时间调节时间超调量峰值时间2.514.140.052%6.9(3) 、引入开环零点在被控对象两个极
21、点的右侧(不进入右半平面)。阶跃响应的仿真曲线数据记录上升时间调节时间超调量峰值时间13.724.50%60根轨迹仿真曲线(4)、实验分析与结论为比例及时加上积分可以消除偏差。积分会使控制速度变慢,系统稳定性变差。根据不同的取值对超调量、调节时间、峰值时间、上升时间都有比较大的影响。3、比例微分(PD)控制(1)、引入开环零点在被控对象两个极点的左侧根轨迹仿真图阶跃响应的仿真图上升时间调节时间超调量峰值时间0.4840.7940.0226%1.5(2) 、引入开环零点在被控对象两个极点之间根轨迹的仿真图阶跃响应仿真图上升时间调节时间超调量峰值时间0.581.170%5(3) 、引入开环零点在被
22、控对象两个极点的右侧(不进入右半平面)根轨迹仿真图阶跃响应仿真图上升时间调节时间超调量峰值时间0.08732.2337%0.4(4)、实验分析与结论响应快、偏差小,能增加系统稳定性,有超前控制作用,可以克服对象的惯性,控制结果有余差。响应时间比较短。调节时间和上升时间都较短。超调量对于引入的零点在原极点的右边时比较大,其他情况都比较短。峰值时间对于引入的零点在原极点之间时比较大,其他情况都比较短。4、比例积分微分(PID)控制,设计参数Kp、KI、KD使得由控制器引入的两个开环零点分别处于:(1)实轴上:固定一个开环零点在被控对象两个开环极点的左侧,使另一个开环零点在被控对象的两个极点的左侧阶
23、跃响应仿真图上升时间调节时间超调量峰值时间0.4222.3924.3%0.9根轨迹仿真图(3) 实轴上:固定一个开环零点在被控对象两个开环极点的左侧,使另一个开环零点在被控对象的两个极点的之间阶跃响应仿真图上升时间调节时间超调量峰值时间0.7562.356.81%1.5(3)、实轴上:固定一个开环零点在被控对象两个开环极点的左侧,使另一个开环零点在被控对象的两个极点的右侧(不进入右半平面)阶跃响应仿真图上升时间调节时间超调量峰值时间3.847.360%60根轨迹仿真图(4) 、实验分析与结论第一种情况:上升时间和峰值时间都比较小,超调量和调节时间稍微有点长。第二种情况:相比第一种情况,超调量降
24、下来了,现在的超调量比较小,其他三项指标都差不多。第三种情况:超调量为0,其他三项指标都比较差。(5) 复平面上:分别固定两个共轭开环零点的实部(或虚部),让虚部(或实部)处于三个不同位置,绘制根轨迹图并观察其变化阶跃响应仿真图上升时间调节时间超调量峰值时间10.418.20%100根轨迹仿真图阶跃响应仿真图上升时间调节时间超调量峰值时间4.877.820%20根轨迹仿真图阶跃响应仿真图上升时间调节时间超调量峰值时间2.873.831.18%5.4根轨迹仿真图(6) 、当控制它的实部相等,虚部变化时,随着虚部的增加上升时间,调节时间,超调量都在不断减少,说明性能在不断提高。超调量有稍微的增加。整
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2026广东湛江市消防救援支队政府专职消防员招录54人备考题库(第一期)及1套完整答案详解
- 2026浙江大学医学院附属第四医院心脏与大血管中心招聘教学科研人才备考题库及完整答案详解
- 2026年福建莆田第五中学初中部编外教师招聘若干人备考题库及完整答案详解
- 2025东风汽车集团股份有限公司财务控制部招聘4人备考题库及一套参考答案详解
- 2025广东中山职业技术学院附属幼儿园招聘备考题库及答案详解(新)
- 2026北京市怀柔区卫生健康委员会所属事业单位第一批招聘额度管理人员54人备考题库及参考答案详解一套
- 2025中国医学科学院医学实验动物研究所第三批招聘3人备考题库及完整答案详解
- 2025浙江嘉兴市海宁市中心医院招聘2人备考题库完整参考答案详解
- 2026广东东莞市疾病预防控制中心(东莞市卫生监督所)招聘聘用人员1人备考题库附答案详解
- 2026年威海乳山市民兵训练基地公开招聘事业单位工作人员备考题库(1名)参考答案详解
- 2026年及未来5年中国半导体热电系统行业市场全景监测及投资战略咨询报告
- 河南豫能控股股份有限公司及所管企业2026届校园招聘127人笔试备考试题及答案解析
- 小学六年级英语2026年上学期语法填空综合题集
- 海洋电子信息产业现状与发展路径研究
- 草原管护考试题及答案
- Unit 8 Let's Communicate!Section B 1a-1e 课件 2025-2026学年人教版八年级英语上册
- 2026年四川单招职高语文基础知识练习与考点分析含答案
- 2026年交管12123驾照学法减分题库100道【基础题】
- 寒假女生安全教育课件
- 2026年孝昌县供水有限公司公开招聘正式员工备考题库及1套参考答案详解
- 6.2 中位数与箱线图 教学设计(2课时)2025-2026学年数学北师大版八年级上册
评论
0/150
提交评论