



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
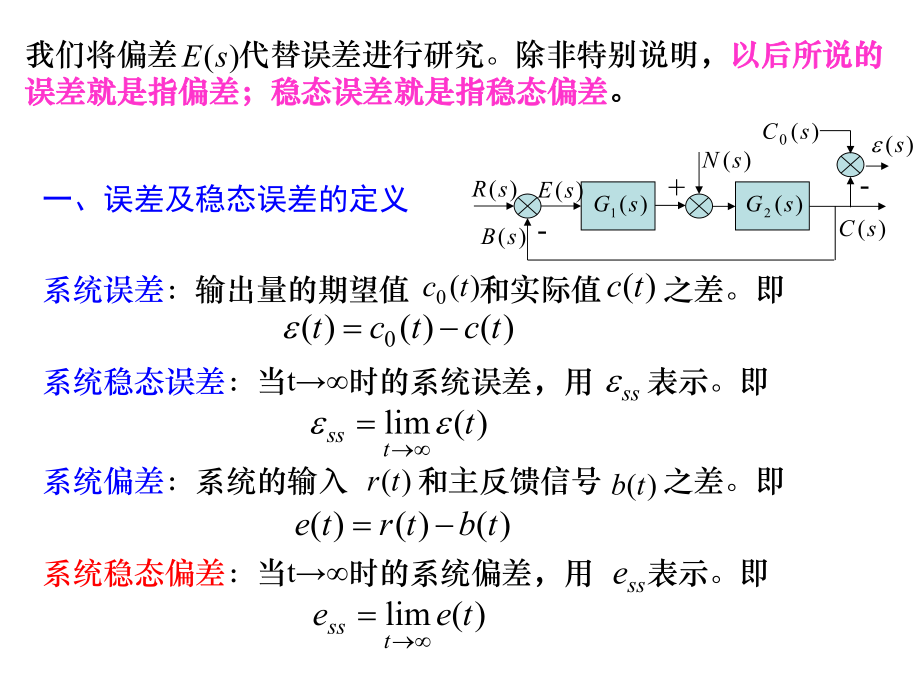
1、第第7章章 控制系统的误差分析和计算控制系统的误差分析和计算郝丽娜 控制系统的分析方法控制系统的分析方法 时域分析法稳定性分析 代数判据动态性能 上升时间 超调稳态性能 稳态误差稳态误差 频域分析法动态性能 频带宽度,频率特性曲线的形状稳定性分析 奈奎斯特稳定判据 主要内容主要内容 7.1 系统稳态误差的基本概念系统稳态误差的基本概念 7.2 系统稳态误差的计算系统稳态误差的计算 7.3 减小稳态误差的途径减小稳态误差的途径 7.4 动态误差动态误差 7.5 工程实例中的误差分析工程实例中的误差分析系统误差:输出量的期望值 和实际值 之差。即)()()(0tctct)(0tc)(tc系统偏差:
2、系统的输入 和主反馈信号 之差。即)()()(tbtrte)(tr)(tb系统稳态误差:当t时的系统误差,用 表示。即)(limttssss系统稳态偏差:当t时的系统偏差,用 表示。即)(limteetsssse一、误差及稳态误差的定义)(sR)(sN)(sC)(2sG)(1sG-+)(sE-)(s)(0sC)(sB我们将偏差 代替误差进行研究。除非特别说明,以后所说的以后所说的误差就是指偏差;稳态误差就是指稳态偏差误差就是指偏差;稳态误差就是指稳态偏差。 )(sE7.1 系统稳态误差的基本概念系统稳态误差的基本概念 7.1.1 系统复域误差系统复域误差 7.1.2 系统时域稳态误差系统时域稳
3、态误差7.1.1 系统复域误差系统复域误差图7.1 控制系统框图在实际系统中是可以量测的 )()()(11)(sXsGsHsEi)()()()()()()()(0sEsGsHsXsXsHsXsEii)(sH)(sG)(isX)(osX)(sE)(sB+-如果如果H(s)=1,则,则 i1( )( )1( )E sX sG s7.1.2 系统时域稳态误差系统时域稳态误差1)稳态误差)稳态误差(steady state error)的定义的定义 稳态误差是系统最终控制精度的重要性能指标,是稳态性能稳态误差是系统最终控制精度的重要性能指标,是稳态性能的测度。系统过渡过程结束后,系统实际输出量与期望输
4、出量之的测度。系统过渡过程结束后,系统实际输出量与期望输出量之间的偏差称为稳态误差。即系统误差的稳态分量。间的偏差称为稳态误差。即系统误差的稳态分量。 , , e(t)=期望值期望值实际值实际值 tsstee)(lim2)系统时域稳态误差的计算)系统时域稳态误差的计算)()(limeteetss 直接计算法。直接计算法。 就是由稳态误差的定义直接计算,即就是由稳态误差的定义直接计算,即lim ( )(7.4)sstee t 0limlim( )(7.5)sstsee tsE s i00limlim(7.6)1sssssXsesE sG s H s 根据根据终值定理终值定理 使用该公式应满足使用
5、该公式应满足sE( (s) )的极点均的极点均位于位于s左半平面左半平面。 终值定理法。终值定理法。 7.2 系统稳态误差的计算系统稳态误差的计算 7.2.1 系统的类型系统的类型 7.2.2 系统的误差传递函数系统的误差传递函数 7.2.3 静态误差系数静态误差系数 7.2.4 用用Bode 图确定误差系数图确定误差系数 7.2.5 扰动引起的误差扰动引起的误差 111(7.7)1miinjjKsG s H ssT s( )( )G s H s一般系统的开环传递函数一般系统的开环传递函数可以写成如下形式可以写成如下形式7.2.1 系统的类型系统的类型012,无积分环节,称为,无积分环节,称为
6、0型系统;型系统;,有一个积分环节,称为,有一个积分环节,称为I型系统;型系统;,有两个积分环节,称为,有两个积分环节,称为II型系统。依此类推。型系统。依此类推。系统类型(type)与系统的阶数(order)的区别K为系统的开环增益;为系统的开环增益;为系统中积分环节的个数为系统中积分环节的个数 稳态误差的大小与开环传递函数的时间常数稳态误差的大小与开环传递函数的时间常数i (i=1,2,m),Tj (j=1,2,n-)均无关。均无关。 100111miinjjKsKG s H sGs HsssT s 1iii0000limlimlimlim(7.8)11sssssssXssXssXsesE
7、 sKG s H ssKs 由式由式(7.8)知,与系统稳态误差有关的因素有:系统的开环知,与系统稳态误差有关的因素有:系统的开环增益增益K ,系统类型及输入信号,系统类型及输入信号Xi(s)等。等。 0001sGs Hs当时,)(1)()()()()()()()()(iioisGsXsEsGsEsXsEsXsXsE等于误差:单位负反馈系统偏差)(isX)(osX)(sE)(sG 系统误差信号方框图系统误差信号方框图7.2.2 系统的误差传递函数系统的误差传递函数)()(11)()()(sHsGsXsEsie误差传递函数误差传递函数为:为:ss0lim ( )lim( )tsee ts E s
8、求时间域的稳态误差根据拉氏变换终值定理i0lim( )1( )( )ssX sG s H s例例7.1。时系统的稳态误差和单位斜坡函数求输入为单位阶跃函数环传递函数为某单位负反馈系统的开ss) 104. 0)(15 . 0(20)(esssGssi00i0lim( )lim( )1( )(0.51)(0.041)lim( )20(0.51)(0.041)sssses E sX sG ssssX sss解iss011( )(0.51)(0.041)11lim0.0520(0.51)(0.041)21sX sssssesss()当单位阶跃输入时,i2ss2012( )(0.51)(0.041)1l
9、im20(0.51)(0.041)sX sssssesss ( )当单位斜坡输入时,Pss0kk0Pk0P7.2.3.1111lim1( )1lim( )lim( )11sssssKesG ssG sKG seK稳态位置误差系数稳态位置误差位置误差系数稳态位置误差7.2.3 静态误差系数静态误差系数系统对单位阶跃输入的稳态误差称为静态位置误差。系统对单位阶跃输入的稳态误差称为静态位置误差。000( )lim( )lim1( )( )11 lim( )( )issssssX sesE sG s H sG s H s1( )iX ss pKHG11)0()0(11位置误差系数1Pk012m012n
10、-IIlim( )(1)(1)(1)lim(1)(1)(1)ssKG sKssss TsT sTs 而对于 型或高于 型系统Pk012m012n0lim( )(1)(1)(1)lim(1)(1)(1)ssKGsKsssKT sT sT s对于 型系统稳态位置误差 20IIsse型的系统型或高于对于Kess110型系统对于vss20kk0vk0sskv07.2.3.211lim1( )lim( )lim( )11lim( )ssssKseG sss G sKs G ses G sK稳态速度误差系数系统对单位斜坡输入的稳态误差称为静态速度误差。系统对单位斜坡输入的稳态误差称为静态速度误差。速度误差
11、系数1vk012m012n0lim( )(1)(1)(1)lim0(1)(1)(1)ssKsG sKssssTsT sT s对 型系统vk012m012n-1Ilim( )(1)(1)(1)lims(1)(1)(1)ssKsG sKssssKTsT sT s对 型系统vk012m012n-IIIIlim( )(1)(1)(1)lims (1)(1)(1)ssKsG sKssssTsT sTs 对 型或高于型的系统速度误差 2v10sseK 对 型系统v11IsseKK对 型系统v1IIII0sseK对或高于型系统320kk02k07.2.3.311lim1( )( )lim( )lim( )1
12、assssasssaKseG s H sss G sKs G seK静态加速度误差系数系统对等加速度输入的稳态误差称为静态加速度误差。系统对等加速度输入的稳态误差称为静态加速度误差。加速度误差系数12212k00120(1)(1)(1)lim( )lim0(1)(1)(1)massnKsssKs G ssTsT sT s对 型系统2212k00121I(1)(1)(1)lim( )lim0(1)(1)(1)massnKsssKs G sss TsT sTs对 型系统2212k0012III(1)(1)(1)lim( )lim(1)(1)(1)massnKsssKs G sss TsT sTs
13、对型以上系统2212k200122II(1)(1)(1)lim( )lim(1)(1)(1)massnKsssKs G ssKs TsT sTs对型系统加速度误差 2Kess1 II型系统对assKe1I0型系统型、对0IIIIIIsse型以上系统型或对稳态误差系数和稳态误差稳态误差系数和稳态误差减小和消除稳态误差方法提高系统的开环增益增加开环传递函数中积分环节系统的稳定性注意注意:(1) 尽管将阶跃输入、速度输入及加速度输入下系统的误差分别称之为位置误差、速度误差和加速度误差,但对速度误差、加速度误差而言并不是指输出与输入的速度、加速度不同,而是指输出与输入之间存在一确定的稳态位置偏差。(2
14、) 如果输入量非单位量时,其稳态偏差(误差)按比例增加。(3) 系统在多个信号共同作用下总的稳态偏差(误差)等于多个信号单独作用下的稳态偏差(误差)之和。04. 0246001sse例7.3:I型单位反馈系统的开环增益K=600rad/s,系统最大跟踪速度max =24/s,求系统在最大跟踪速度下的稳态误差。224)(ssXi解:系统为恒速输入,输入信号系统的稳态误差为二阶振荡系统如方块图所示,求系统在单位阶跃、单位速度、单位加速度输入时的稳态误差。2nn(2)s so( )Xsi( )Xs例7. 4n2nknn2( )(2)12G ss sss解 将系统开环传递函数变成标准形式ss0lim
15、( )lim( )tsee ts E si0lim( )1( )( )ssX sG s H snI2K由于系统为 型系统,且vn1122sseKK( ) 速度误差;位置误差0) 1 (ssesse加速度误差)3(例:例:系统结构如下图:若输入信号为21( )12r ttt 试求系统的稳态误差。解:解: 判别稳定性。系统的闭环特征方程为232111(1)(1)00mmmmms T sK KsT ssK KsK K1 mmmTKKT稳定条件:(1), 均应大于零;(2) 根据系统结构与稳态误差之间的关系,可以直接求sse从结构图看出,该系统为单位反馈且属型系统。因此12203112310( )01
16、1ssssssmssssssssmer tteateKK KeeeeK K当输入r(t)=1(t)时,;当输入时,;1当输入r(t)=时,2所以系统的稳态误差ss0lim ( )lim( )tsee ts E si0lim( )1( )( )ssX sG s H s7.2.4 用用Bode 图确定误差系数图确定误差系数 对于单位负反馈系统,静态位置、速度和加速度误差常数分别描述了0型、 I型和II型系统的低频特性。 而系统的类型确定了低频时对数幅值曲线的斜率。 所以,可以用Bode 图确定误差系数 0型系统pKKjHjG)()(lim0(1)静态静态位置位置误差常数的确定误差常数的确定p177
17、12mk12n(1)(1)(1)( )(1)(1)(1)KsssGsT sT sT s低频时:低频时: I型系统(稳态速度误差系数)1vvKjKlg20|/|lg20vKdBjKjHjGv0|/|lg20| )()(|lg20(2)静态静态速度速度误差常数的确定误差常数的确定 1001111miinjjKsKG s H sGs HsssT s II型系统(稳态加速度误差系数)1aaKjKlg20|)/(|lg202aKdBjKjHjGa0|)/(|lg20| )()(|lg202(3)静态静态加速度加速度误差常数的确定误差常数的确定 100222111miinjjKsKG s H sGs Hs
18、ssT s7.2.5 扰动引起的误差扰动引起的误差当系统存在扰动时,系统的总误差为各个信号单独作用时,对输当系统存在扰动时,系统的总误差为各个信号单独作用时,对输入端引起的误差之和。入端引起的误差之和。21sssssseee为扰动所引起的误差。所引起的误差;为系统输入其中,2i1)(ssssesXe负载力矩的变化、放大器的零点漂移、电网电压波动和环境温度的变化等,这些都会引起稳态误差。i212( )0( )( )( )( )( )( )1( )( )( )NX sN sE sG s H sEsN sG s G s H s 时,由扰动引起的误差为22012( )( )( )lim( )1( )(
19、 )( )sssG s H setsN sG s G s H s 由扰动引起的时域误差为0012( )( )( )( )( )( )( )( )( )( )( )iE sX sY sY sXs H sXsN sE s G s G sP180例例7.5 )(osX)(sN)(isX 1KsK2系统如下图所示,输入和扰动均为单位阶跃系统如下图所示,输入和扰动均为单位阶跃函数,试确定系统总稳态误差。函数,试确定系统总稳态误差。解解21sssssseee系统总稳态误差为系统总稳态误差为由于系统为由于系统为I型系统,所以型系统,所以01sse12120211limKsKKsKsesss11KessP18
20、0例例7.67.3 减小稳态误差的途径减小稳态误差的途径保证元件有一定的精度和稳定的性能,尤其是反馈通道元件 增大系统开环放大系数可以增强系统对参考输入的跟随能力;增大扰动作用点以前的前向通道放大系数可以降低扰动引起的稳态误差增加前向通道中积分环节数,使系统型号提高,可以消除不同输入信号时的稳态误差 采用复合(或称顺馈)控制来对误差进行补偿。补偿的方式分为按干扰补偿和按输入补偿两种。 )(osX)(sN)(sH)(isX )(1sG)(2sG)(sEN)(sGn 此时扰动引起的输出为此时扰动引起的输出为)()()(1)()()()()(21212oNsNsGsGsGsGsGsGsXn 按干扰补
21、偿按干扰补偿当干扰直接可测量时,就可以直接利用这个信息进行补偿。方法:将干扰信号通过补偿器 反馈引入前馈后,系统的闭环特征多项式没有发生任何变化,引入前馈后,系统的闭环特征多项式没有发生任何变化,即不会影响系统的稳定性即不会影响系统的稳定性 ( )nG siooon12( )( )( )( )( ) ( )( )( )( )( )( )E sX sXsXsXsE sGs N s G sN sG s 当输入当输入X( s)=0 时时从结构看,按干扰补偿是利用了双通道原理:从结构看,按干扰补偿是利用了双通道原理:一条是由干扰信号经过一条是由干扰信号经过 、 到达第二个相加点;到达第二个相加点;另一
22、条是由干扰信号直接到达第二个相加点。另一条是由干扰信号直接到达第二个相加点。两个通道的信号在此相加点处大小相同,方向相反,从而实现了对两个通道的信号在此相加点处大小相同,方向相反,从而实现了对干扰信号的全补偿。干扰信号的全补偿。( )nG s1( )G s由于由于 分母的分母的s阶次一般比分子的阶次一般比分子的s阶次高,阶次高,因而将引入高频因而将引入高频噪声噪声.式式(7.24) 的条件在工程实践中的条件在工程实践中只能近似地得到满足只能近似地得到满足。 0 1)()()(12sGsGsGn为了为了消除消除扰动对系统输出的影响,则有:扰动对系统输出的影响,则有: )(1)(1sGsGn(7.
23、24) 对扰动进行全补偿的条件 )(1sG 按输入补偿按输入补偿ioori( )( )( )( ) ( )( )( ) ( )E sX sXsXsE sG s X s G sroi1( )( )( )( )1( )G sXsG s X sG srriii1( )1( ) ( )( )( )( )( )( )1( )1( )G sG s G sE sX sG s X sX sG sG sr1( ) ( )0G s G sr1( )( )G sG s补偿器补偿器 放在系统主回路以外放在系统主回路以外。因此,可先设计主回路,保证。因此,可先设计主回路,保证稳定,再设计补偿器。稳定,再设计补偿器。r(
24、 )G s引入前馈后,系统的闭环特征多项式没有发生任何变化,引入前馈后,系统的闭环特征多项式没有发生任何变化,即不会影响系统的稳定性即不会影响系统的稳定性 前馈补偿装置系统中增加了一个输入信号( )( )riG s X s完全消除误差的物理意义: 其产生的误差信号与原输入信号( )iX s产生的误差信号相比,大小相等而方向相反 由于由于)(sG的频段内实现近似全补偿,以使的频段内实现近似全补偿,以使)(sGr的形式简单并易于实现。的形式简单并易于实现。一般具有比较复杂的形式,故全补偿条件一般具有比较复杂的形式,故全补偿条件的物理实现相当困难。在工程实践中,大多采用满足的物理实现相当困难。在工程
25、实践中,大多采用满足跟踪精度要求的部分补偿条件,或者在对系统性能起主要影响跟踪精度要求的部分补偿条件,或者在对系统性能起主要影响7.4 动态误差动态误差 2( )110000(7.25)2!nnssssn 2iiii( )i10002!10!nnE ss XsXssXss Xss Xsn ( )( )iiii1100002!nnssetx tx tx txtn 动态误差动态误差e(t)是时间的函数。把误差传递函数是时间的函数。把误差传递函数(s)在在s=0的邻域展开成泰勒级数并取前的邻域展开成泰勒级数并取前n+1项:项:误差的拉氏变换式为误差的拉氏变换式为对上式进行拉氏逆变换,得对上式进行拉氏逆变换,得 ( )0121111110 ,0 ,0 ,
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 福州职业技术学院《高级语言与程序设计》2023-2024学年第二学期期末试卷
- 广州商学院《不动产籍管理》2023-2024学年第二学期期末试卷
- 徐州工程学院《油画间接技法》2023-2024学年第二学期期末试卷
- 四川商务职业学院《电气控制与PC》2023-2024学年第二学期期末试卷
- 黑河学院《大数据原理与实践》2023-2024学年第二学期期末试卷
- 南京医科大学《无人机通信与导航技术》2023-2024学年第二学期期末试卷
- 宿迁泽达职业技术学院《医学电生理》2023-2024学年第二学期期末试卷
- 江苏航空职业技术学院《智能运输系统2》2023-2024学年第二学期期末试卷
- 河南应用技术职业学院《钢铁工业技术路线图研发计划》2023-2024学年第二学期期末试卷
- 江西农业工程职业学院《家用电器》2023-2024学年第二学期期末试卷
- 工程质量问题整改回执单
- 第9章-辅助技术与环境改造
- 民事非法强占土地上诉状模板
- 铁路基础知识-课件
- 2022公务员录用体检操作手册(试行)
- 骨盆骨折PPT完整版
- 2023年边防检查考试真题模拟汇编(共638题)
- EAP服务案例解析
- 大学材料力学课件:《弯曲的几个补充问题》
- 废钢清理安全操作规程
- 无人机概述专业知识课件
评论
0/150
提交评论