



下载本文档
版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
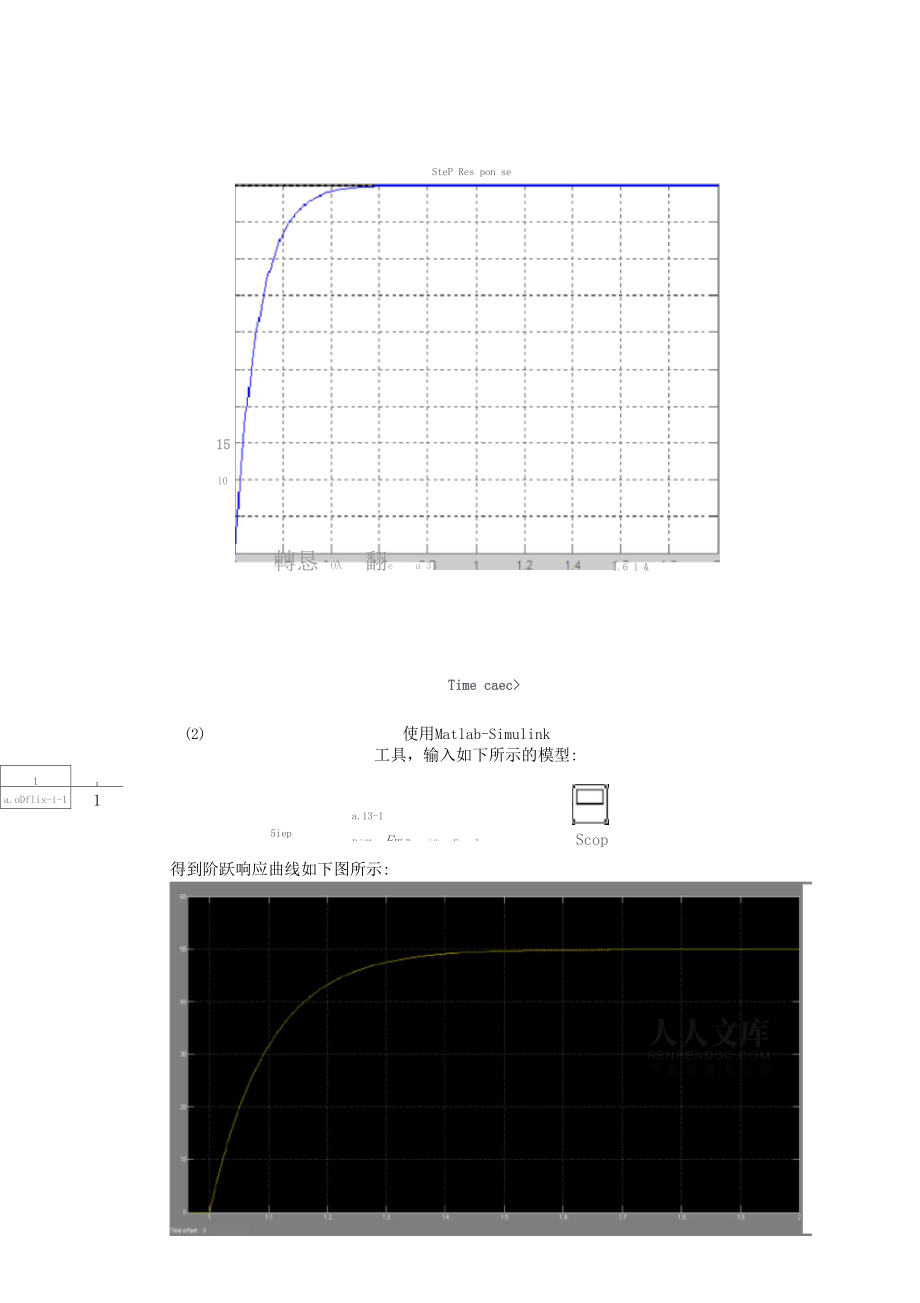
1、实验一 MATLAB 仿真实验利用Matlab-Simulink工具进行如下仿真实验。1.1直流电机的阶跃响应如图1-1,对直流电机输入一个阶跃信号,画出阶跃响应曲线,指出主导极点。(0.15-+ 1)( 1x1(1-5+1)50直流电机直流电机的阶跃响应(1) 先使用编程方法进行分析,相关程序如下:num=0,0,50;den 仁0.1 1;den 2=1e-4 1;den=conv (de n1,de n2); sys=tf( nu m,de n) ste p(nu m,de n,2) grid on输出结果为:Ttansfer function:50le-005 S 2 + 0.1001
2、 s + 1从而,由计算结果可知控制系统为二阶系统。特征方程的两个根为 s1 = 10,s2= 10000。因此,主导极点为s1( 10,0j)。进一步计算可得:无 阻尼自振角频率3 n=316.23rad/s,阻尼比Z =15.83。阶跃响应曲线如下图:1510SteP Res pon se轉恳 OA翻ea 31.6 1 &100Time caec>(2) 使用Matlab-Simulink工具,输入如下所示的模型:5iep11a.oDflis-i-11a.13-1rrsRjf&r Fw Tranjftr For IScope得到阶跃响应曲线如下图所示:1.2直流电机的
3、速度闭环控制如图1-2,用测速发电机检测直流电机转速,用控制器Gc(s控制加到电机电枢上的电压。测速发屯机图1-2直流电机速度闭环控制(1)假设Gc(s)=100,用matlab画出控制系统开环Bode图,计算增益剪切频 率、相位裕量、相位剪切频率、增益裕量。首先利用编程计算所要求的量,程序代码如下sysGc=100;num1=50;num2=0.02;den 11=0.1 1;den 12=1e-4 1;den 仁co nv(de n11,de n12);den 2=0.001,1;sysG1=tf( num1,de n1);sysH=tf( num2,de n2);sysG=senes(s
4、ysGc,sysG1);sys=series(sysG,sysH)bode(sys)gm, pm ,wcg,wc p=margi n(sys)grid on输出结果为:Transfer unctron:Ie-005 3"3 + 0, OOOllOl2 + 0. 1011 s + L增益裕量gm =11.1214相位裕量pm =48.1370相位剪切频率wcg =3.1797e+003 增益剪切频率wcp =784.3434 伯德图为:'ElVL -L-_ J 亠"I .JJIIK出f' "J"1 r Fl- LI丄lL II r r 一i
5、咅T i: kI L I I L n I IJ q n I - 1 p II I I I PI I丄一- 卜Lrd;I I 丄! L : :;i I !":.; I±4!-:|和屮9 Ufk'i -IP'50K p(0.001s 1)闭环传递函数为:G(s)通过分析Bode图,选择合适的常数Kp作为Gc(s),使闭环阶跃响应的最大 超调量在0-5%之间。(0.1s 1)(0.001s 1)(0.0001s 1) Kp得到64.1671.8分析上面的根据=180 + (Mp(%)100(1 sin )Bode图,相频特性斜率小于c)可知,为了增大相位裕量,5,
6、 0 Mp (%)51,即随频率增加,相位在减小。必须减小剪切频率c的值,为此需要将Bode图的幅频特性曲线向下平移。通过 Matlab绘制出相位裕量与Kp 的关系,得到下图,从图中可以看出对应的 Kp大致在3450之间,从而,取Kp=40,此时,1卜0训30Jr5DW增益裕量gm =27.8035相位裕量pm =68.8703相位剪切频率 wcg =3.1797e+003 增益剪切频率wcp =374.2274相应的伯德图为(3) 计算此时的稳态位置误差系数,画出闭环系统阶跃响应曲线,稳态值是否 与理论一致?分析可知,本系统的开环传递函数为0型系统。而稳态位置误差系数为Kp Nm0G(s)H
7、(s) 00丽20001)(1 104s 1) 0.001sO.。2 - 401稳态输出的理论值是:X(s)lim s -s 0 sG(s)1 G(s) H(s)40 5048.781 40 50 0.02使用Matlab-Simulink工具,输入如下所示的模型:得到如下的闭环系统阶跃响应曲线:从图中可以得出,稳态值为48.8,与理论值基本一致。 令Gc(s)=KP+KI/S,通过分析(2)的Bode图,判断如何取合适的Kp和KI的 值,使得闭环系统既具有高的剪切频率和合适的相位裕量,又具有尽可能 高的稳态速度误差系数。画出阶跃响应曲线。开环传递函数:Kp(s KL)G(s)H(s)s (0
8、.1s 1)(0.0001s 1) 0.001s 1s(0.1s 1)(0.0001s 1)(0.001s 1)500.02Kp(s 护)KP对于该比例积分控制器,使Kt在大约6的位置,Bode图的第一个拐点。令Kp 40,皿10,此时方块图为:Kpgw画出Bode图如下:此时增益裕量 相位裕量PmGm 27.5 ;67.3328 ;相位剪切频率Wcg 3.1623 103rad/s ;增益剪切频率Wcp 374.3495rad / s。稳态速度误差系数KvlimsG(s)H(s) 400。s 0得到了较高的剪切频率、阶跃响应曲线为:合适的相位裕量,稳态速度误差系数也较高。 考虑实际环节的饱和
9、特性对响应曲线的影响:在(4)的基础上,在控制器的输出端加饱和环节,饱和值为±5,输入单位阶跃信号,看各点波形,阶跃响应 曲线与(4)有何区别?加入饱和环节的模型如下图:rm?0 ODli-ai*1話ITiinhw “I Q 您T I liHPvW y I阶跃响应曲线如下图:由上图可知,信号达到饱和点后就开始下降了 ,由仿真结果可知,考虑了实际 环节的饱和特性后,阶跃响应曲线最大超调量 Mp增大,上升时间tr和调整时间 ts均增大。系统的稳定性、快速性均变差,但对准确性无影响。1.3直流电机的位置闭环控制直流电机位置闭环控制系统如图1-3,其中做了电流控制环。T为电磁力矩, Td为作
10、用在电机轴上的阻力矩。few控制黠速度简化心的揑制器电流坏0.020.00k+ 1IxlQ-i + l测速发电机w v_2OUT-*1y£7的I划1J宜流电机位'闻闭坏控制(1)先调好速度环:仅对图形式,确定其参数。1-3中的速度环分析和仿真,速度控制器Gc3(s)取为Kp开环传递函数为:G(s)4Kps(1 104s 1)(0.001s 1)取 Kp 100,则G(s)400s(1 104s 1)(0.001s 1)用Matlab算得增益裕量Gm27.5000 ;相位裕量Pm67.3328° ;相位剪切频率Wcg 3.1623 103rad/s;增益剪切频率Wcp
11、 374.3495rad / s。(2)设Td=1(t),仿真速度环在单位阶跃输入下的输出3,分析稳态误差。模型为:先进行稳态误差理论分析: 输入引起的稳态误差带入计算得:ess1 = lSm0 s 1H(s) 1 Gcw(s)Gi(s)G2(s)H(s)Xi(s)ess1= lim s 0 s 0 0.0214 100s(0.001s 1)(0.0001s 1)从而输入引起的稳态误差为0 干扰引起的稳态误差ess2=|Sm0S1H(S)G2(S)H(s)Gcw(s)G1(s)G2(s)H(s)Td(s)带入计算得:ess2 S即干扰引起的稳态误差为 总误差即为:0.01s0.020.5。eS
12、sess14s(0.001s 1)4 100s(0.001s 1)(0.0001s 1)1-0.5 s0.5希望稳态输出Xoi(SmsXi(s)H(s)002 5049.5输出结果如下所示从而理论稳态输出为 再利用matlab进行仿真,从而,稳态输出值=50-0.5=49.5,与仿真结果一致。(3)调试位置环:令Td=0,分析速度环的闭环传递函数,设计、调试Kp形式的Gc0 (s,使位置环具有尽可能快的响应速度并且无超调。Td0 , Gcw(s) 100时,速度环闭环传递函数为20000 (0.001s 1)20000K p(0.001s 1)s(0.0001s 1)(0.001s 1) 40
13、0位置环开环传递函数为-s (0.0001s 1)(0.001 s 1) 400s要求尽可能快的响应速度意味着剪切频率要大同时调整时间要短一些;根据Mp二100( 1-sin )-5得到相位裕量71.8时,无超调。利用下图所示模型ErS* nJG EHFI 1屮弓I5 伽曲分1JOTrk-nb =a经过不断调整Kp的大小,得到Kp 4,满足响应速度最快,而且无超调的条件。此时,增益裕量Gm16.4748;相位裕量Pm72.0819°相位剪切频率3Wcg 1.2497 103rad/s ;增益剪切频率Wcp 199.9874rad /s。响应曲线为:(4) 令Td=1(t),仿真位置环
14、在单位阶跃输入下的输出00分析稳态误差。先进行稳态误差理论分析: 输入引起的稳态误差ess1= lim s Xi (s)s 01 Gcw(s)G1(s)G2(s)H(s)ess1=龙叫 s -1带入计算得:20000 4(0.001 s+1) s2(0.0001s 1)(0.0001s 1)+400 s从而输入引起的稳态误差为干扰引起的稳态误差ess2= smsGcw(s)G1(s)G2(s) c1 Gcw(s)G1(s)G2(s)H(s)G3 (s)Gcw (S)G1 (s)G2 (s)1 Gcw(s)G1(s)G2(s)H(s)G3(s)GcGcw(s)G1(s)Td(s)带入计算得:ess2Gcw(s)G c (s)4 1000.0025即干扰引起的稳态误差为0.0025。 总误差即为:essess1ess2 0.0025希望稳态输出Xoi()从而理论稳态输出为0.9975在(3)的基础上,稍作修改,得到如下所示的原理图从上图中可以得到理论稳态输出值为:0.9975。I PiOFF I*0paEFT I2* Blip得到响应曲线为:理论稳态误差即为:2.5 10 3。实际稳态输出值为:0.9975实际稳态误差即为:2.5 103。与理论值一致。 如何调整Gc wS)和Gc Bs)的形式可以使Td为常数时,B的稳态误差为0?确定控制器的参数。由(4
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 识货节日活动方案
- 安全管理制度样板制订
- 电力电子技术演练预案计划
- 保洁服务合同
- 蓝领团建活动方案
- 仓库盘点应急处理
- 蛋糕特色活动方案
- 虎年新年登高活动方案
- 读书月宣传活动方案
- 装修公司广告活动方案
- 中科院心理咨询师培训考试题库及答案-10心理咨询专业伦理(新版)
- 市政道路雨污水管排水工程施工方案
- 2025河南农商银行金融科技人才常态化招聘考试参考试题及答案解析
- 2025年船舶建造合同协议样本
- 工业高质量数据集研究报告 2025 中国工业互联网研究院
- 2025下半年浙江嘉兴市属国有企业招聘59人考试参考试题及答案解析
- 2025-2026学年统编版小学语文四年级上册期中考试测试卷及参考答案
- 甘肃省张掖市甘州区2024-2025学年八年级上学期期中考试英语试卷(含解析无听力原文及音频)
- 初中物理作业设计
- GB/T 45817-2025消费品质量分级陶瓷砖
- 教师职业道德与专业发展知到智慧树章节测试课后答案2024年秋山东师范大学
评论
0/150
提交评论