



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、异步电动机起动过程动态仿真及堵转判定方法冯崇智,李永丽 (天津大学电气与自动化工程学院,天津300072) 摘 要:对异步电动机起动过程中阻抗变化曲线进行了深入分析,根据转差率与机端测量阻抗的变化特性,给出了起动过程中堵转的判定方法。利用MATLAB软件中的动态仿真工具SIMULINK建立了异步电动机起动过程的仿真模型,仿真结果验证了判据的正确性。 关键词:异步电动机;起动;堵转;阻抗曲线1 引言异步电动机广泛应用于工农业和其它国民经济各部门,作为拖动机床、水泵、起重机、卷扬机、轻工业和农副业加工设备以及其它一
2、般机械的动力。它是各种电动机中应用最广,需求量最大的一种电机,因而做好异步电机的合理使用和保护工作具有重要的意义。异步电机常见的电气故障有:过载、堵转、断相和欠压运行等。长期的实际运行情况表明:过载、堵转和断相事故是电动机的主要故障,这些事故均会引起电机绕组过热甚至烧毁电机绕组。异步电机发生堵转故障时,传统的保护原理是通过电流量的定时限、反时限或起动时间过长来实现的。但前者对异步电机起动过程中出现的堵转故障保护不理想,都需要经过异步电机起动时间之后才能做出是否堵转的判断,保护动作时间比较长;另外,起动过程中出现堵转更容易引起电机绕组过热甚至烧毁电机绕组。因此本文通过利用MATLAB软件中的动态
3、仿真工具SIMULINK建立了异步电动机起动过程的仿真模型,通过实例对鼠笼型异步电动机起动过程中的阻抗曲线进行仿真,分析了起动过程中阻抗曲线的变化规律,提出利用阻抗变化率判断异步电动机起动过程出现堵转故障的新方法,缩短了起动过程中堵转保护的动作出口时间。2 基于异步电动机的简化等值电路分析1在图1所示的异步电机简化等值电路中,包括两个并联支路,即主回路和激磁回路。它们接在无穷大系统的电网上,在主回路中电机的感抗可以看作是恒定的,只有电阻随转差率s变化。由简化等值电路有: 向量MA与AB垂直,MA、AB、MB组成直角三角形,此三角形具有恒定的斜边MB。由几何学可知,一个有恒定斜边MB的直角三角形
4、,其顶点A的轨迹必在以MB为直径的圆周上。所以滑差s,变化时,点A在以MB为直径的圆弧MAB上运动。当时,电流,A点与M点重合;当时,电流对应的矢量末端与B点重合,所以当s从1变化到0时,A点由B变化到M。由图2(b),假设外施电压U1一定,且激磁参数Zm不变,从而空载电流I0一定。因定子电流,可将图2(a)中任意负载时电动机负载分量电流叠加在空载电流,则得定子电流OA,如图2(b)所示。很明显随着,的变化,向量的末端与沿着同一圆周移动。当s由1变化到0时,A点由B变化到M,所以由图2(b)可以看出:当A点由B变化到M时,由大变小,即随着,由0至1变化,单调递增,因而对应机端阻抗由小变大。起动
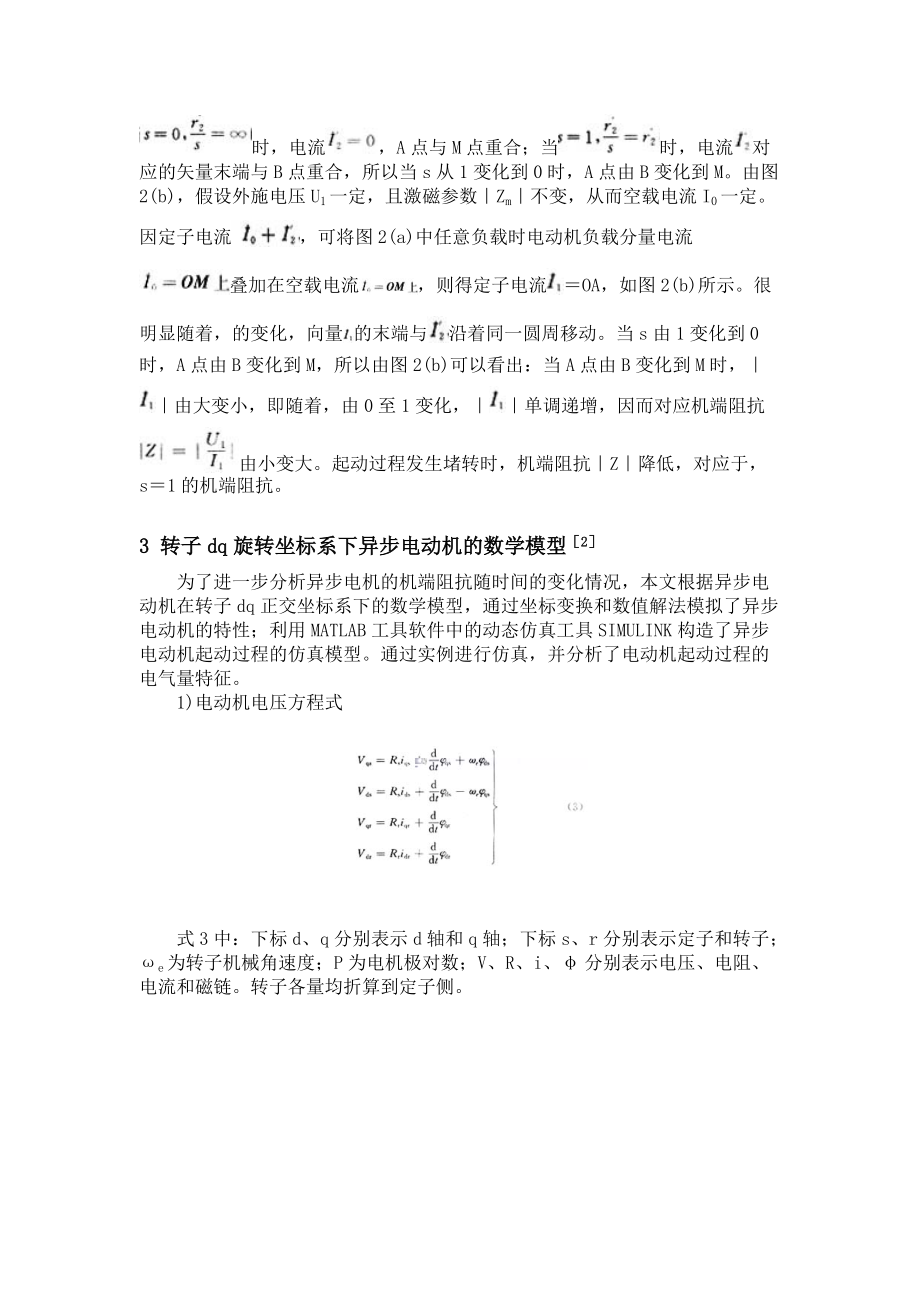
5、过程发生堵转时,机端阻抗Z降低,对应于,s1的机端阻抗。3 转子dq旋转坐标系下异步电动机的数学模型2为了进一步分析异步电机的机端阻抗随时间的变化情况,本文根据异步电动机在转子dq正交坐标系下的数学模型,通过坐标变换和数值解法模拟了异步电动机的特性;利用MATLAB工具软件中的动态仿真工具SIMULINK构造了异步电动机起动过程的仿真模型。通过实例进行仿真,并分析了电动机起动过程的电气量特征。1)电动机电压方程式式3中:下标d、q分别表示d轴和q轴;下标s、r分别表示定子和转子;e为转子机械角速度;P为电机极对数;V、R、i、分别表示电压、电阻、电流和磁链。转子各量均折算到定子侧。式4中:Ls
6、为dq坐标系下定子等效绕组的自感;Lr为dq坐标系下转子等效绕组的自感;Lm为dq坐标系下定子和转子同轴等效绕组间的互感;Lls为定子每相绕组的漏电感;LIr为转子每相绕组的漏电感。 3)电动机电磁转矩方程式 式中:H为转动惯量;Tm为负载转矩;r为转子角速度;为转子角度。4 异步电动机的仿真根据异步电动机在转子dq轴旋转坐标系下的数学模型和坐标变换关系,利用MATLAB6.5软件中的动态仿真工具SIMULINK34中的simpowersystems工具箱模块建立对应的异步电动机动态仿真模型,如图3所示。在仿真过程中由电流
7、电压测量模块采样电流电压瞬时值,经傅氏算法模块得到电流电压的有效值,并得到机端阻抗.通过突加数倍的额定转矩在异步电动机负载转矩端口来实现电动机堵转故障的仿真。三相四极鼠笼型异步电动机Pn2.2 kW,f50 Hz,UN380 V,0.88,定子Y接n1479 r/min。电机参数:Rs0.253,LsLr0.265,Rr2.85,Lm0.253。电动机上的总飞轮矩J0.1 kgm2。依据上述电动机参数,电动机起动过程仿真结果如图4所示。图4(a)为A相电流幅值随时间变化曲线,图4(b)为A相阻抗模值随时间变化曲线。这两条曲线的变化趋势与前面理论分析结果一致。下面就电动机正常起动和起动过程中出现
8、堵转的仿真结果进行对比,分析堵转的特点。图5(a)为A相机端阻抗随时间变化图,图中曲线1和2分别对应正常起动和起动过程中出现堵转的情况。由曲线1可以看出:正常起动时,阻抗Z是一条随时间单调递增的曲线;并且随起动时间的增大,变化率逐渐增大,起动接近结束时减小,最后变为0。由曲线2可以看出:起动过程中出现堵转前,阻抗Z是一条单调递增的曲线>0;堵转后,阻抗Z是一条单调递减的曲线<0. 取适当的时间间隔t,计算阻抗差Z(t)Z(t)Z(tt)(tt),通过仿真得到图5(b)。对图5(b)分析如下:的曲线1所示:起动结束前(t)0,起动结束时(t)0。2
9、)起动过程中出现堵转时(t)变化情况如图5(b)的曲线2所示:堵转前(t)0,在堵转时刻会有Z(t)0。由此提出异步电动机起动过程出现堵转故障判断方法: Z(t)ZZd (7)当式(7)满足时,就判断异步电动机起动过程出现堵转故障,其中ZZd为一负的整定值。通过这种新的堵转判断方法,可以实时监测起动过程是否出现堵转故障,而不必延时到电机起动时间后,才能做出判断。因此本方法缩短了电动机起动过程中发生堵转时的保护动作时间。 5 结论主要针对异步电动机起动过程出现的堵转故障,提出了利用机端阻抗随起动时间变化特性来判断起动过程出现堵转故障的新方法。与以前通过电流量的定时限或反时限来实现堵转保护相比,该方法缩短了堵转判断时间,减少了电机绕组因堵转烧损的危险。如果再结合电动机的速断、负序和过负荷等保护,就可构成一种比较完善的综合电动机保护。参考文献 1许实章.电机学M.北京:北京机械工业出版社,19882贺益康.交流电
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2025年中国高温超声波耦合剂行业市场分析及投资价值评估前景预测报告
- 2025年新能源行业企业数字化转型与产业链协同优化策略研究
- 2025年新能源行业绿色技术创新与产业政策建议报告
- 新能源领域2025:技术创新与知识产权运营技术标准研究报告
- 2025年海洋能发电技术专利分析报告
- 2025年教育行业质量评估与认证体系教育资源整合研究报告
- 医疗法制法规知识培训课件
- 1.3 人工智能研究内容与应用说课稿高中信息技术人教中图版2019选修4 人工智能初步-人教中图版2019
- 2025年文化遗产数字化保护与文化遗产数字化保护技术国际合作报告
- 2025年中国负性光刻胶去胶剂行业市场分析及投资价值评估前景预测报告
- 2025年中级制图员《理论知识》考试真题(含新版解析)
- 广东省2025年度初级注册安全工程师职业资格考试金属非金属矿山安全复习题及答案
- 十二经络课件
- Starter Unit 3 Welcome 单元测试(含答案)人教版(2024)七年级英语上册
- 玻璃委托代加工合同范本
- 年产9000吨塑料粒子项目报告表
- 秦朝服饰设计分享
- 子宫脱垂的中医护理查房
- 2024年12月英语四级真题及答案-第1套
- 【课件】急性百草枯农药中毒
- 老年人能力评估师试题【含答案】
评论
0/150
提交评论