
下载本文档
版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
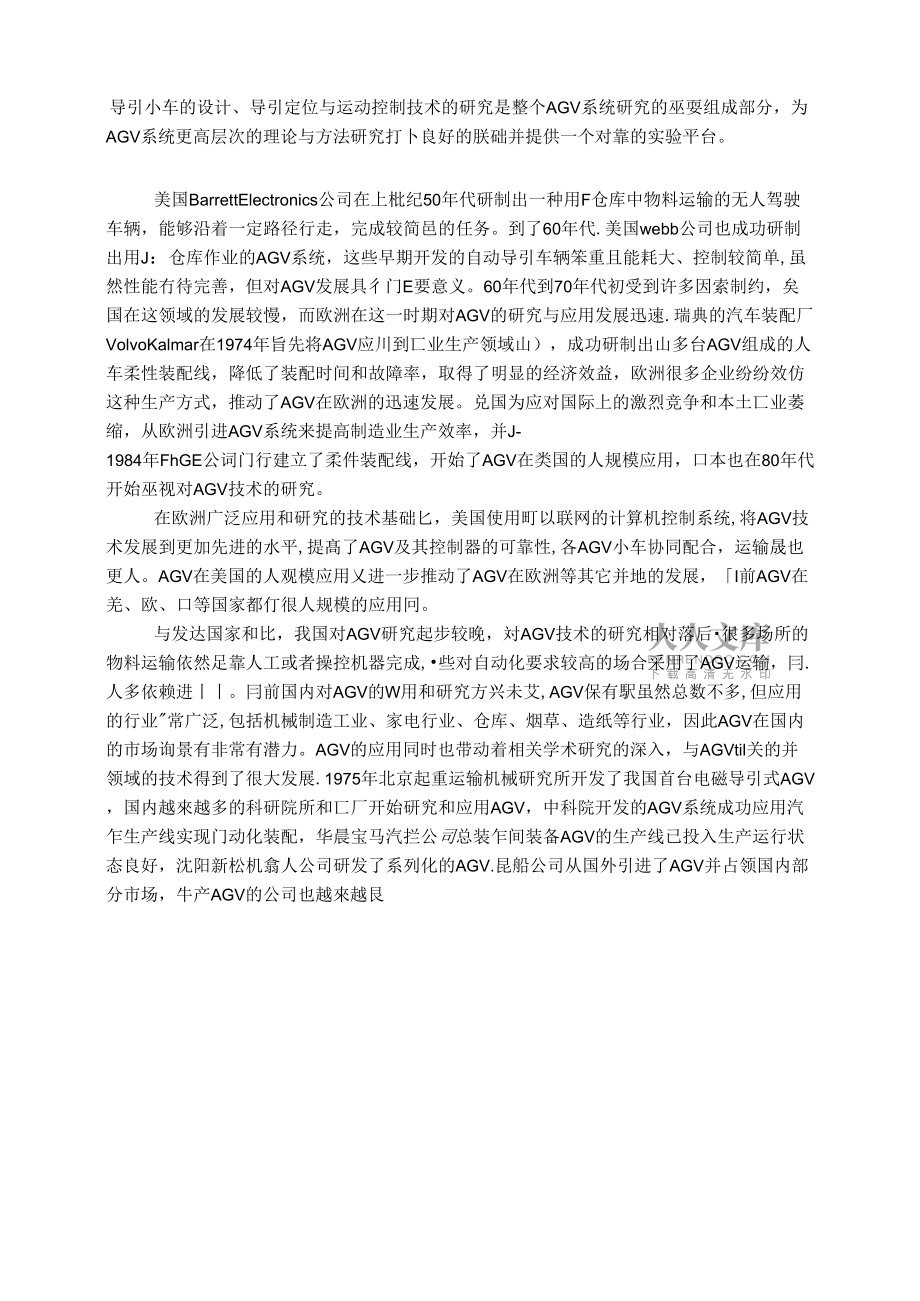
1、AGV国内外应用与发展现状由AGV对工件坏境的适应性好【叫及变行走跻径容站丈现,能幅充分利用工作坏境的空间*搬运物料吋移动灵活,并且貝-有运输效率高、工作可靠、节能无公害等优点+除了在自动化生严车間和柔性生产线屮组成高效、快捷的物流系统外*在不宜有人员进入的工作场所也尤苴适用*因而在机械、电子、纺织、巻烟、造纸等许多行业得到了广泛的运用,如图!-1所示。a汽车行业b)电f行业c)烟草行业d造纸行业图1-1為GV在备行业的应用向动寻引小车技术研究的不断深入扩展了涉及到的领域*作沟机电一体化系统的典型代表,自动导引小车融合了机械、电子、计算机、自动控制和传感器技术,是移动机器人的分支罔,其屮PAG
2、V的本体结构的设计和控制方达是决定AGV性能的关讎因素冏,导引与定位等运动控制技术是自动导引小车研究的重点。目前-低成本、智能化的向动寻引小车的研究与开发得到了越來越影的重视“叫尤其是AGVe引运动的智能化、自动化控制+吕经成为硏究领域的热点*f対此深入研究自动导引小车具有耋要的理论和实际意义卩讥本丈设计加工出了一种四轮式自动寻引小车*进行了自动导引小车运动分析建模和运动控制的研究,井对基于计算机的AGV进行了运动检测控制实验。自动导引小车的设计、导引定位与运动控制技术的研究是整个AGV系统研究的巫耍组成部分,为AGV系统更高层次的理论与方法研究打卜良好的朕础并提供一个对靠的实验平台。美国Ba
3、rrettElectronics公司在上枇纪50年代研制出一种用F仓库中物料运输的无人驾驶车辆,能够沿着一定路径行走,完成较简邑的任务。到了60年代.美国webb公司也成功研制出用J:仓库作业的AGV系统,这些早期开发的自动导引车辆笨重且能耗大、控制较简单,虽然性能冇待完善,但对AGV发展具彳门E要意义。60年代到70年代初受到许多因索制约,矣国在这领域的发展较慢,而欧洲在这一时期对AGV的研究与应用发展迅速.瑞典的汽车装配厂VolvoKalmar在1974年旨先将AGV应川到匸业生产领域山),成功研制出山多台AGV组成的人车柔性装配线,降低了装配时间和故障率,取得了明显的经济效益,欧洲很多企
4、业纷纷效仿这种生产方式,推动了AGV在欧洲的迅速发展。兑国为应对国际上的激烈竞争和本土匸业萎缩,从欧洲引进AGV系统来提高制造业生产效率,并J-1984年FhGE公词门行建立了柔件装配线,开始了AGV在类国的人规模应用,口本也在80年代开始巫视对AGV技术的研究。在欧洲广泛应用和研究的技术基础匕,美国使用町以联网的计算机控制系统,将AGV技术发展到更加先进的水平,提髙了AGV及其控制器的可靠性,各AGV小车协同配合,运输晟也更人。AGV在美国的人观模应用乂进一步推动了AGV在欧洲等其它并地的发展,I前AGV在羌、欧、口等国家都仃很人规模的应用冋。与发达国家和比,我国对AGV研究起步较晚,対AG
5、V技术的研究相对落后很多场所的物料运输依然足靠人工或者操控机器完成,些对自动化要求较高的场合采用了AGV运输,冃.人多依赖进丨丨。冃前国内对AGV的W用和研究方兴未艾,AGV保有駅虽然总数不多,但应用的行业常广泛,包括机械制造工业、家电行业、仓库、烟草、造纸等行业,因此AGV在国内的市场询景有非常有潜力。AGV的应用同时也带动着相关学术研究的深入,与AGVtil关的并领域的技术得到了很大发展.1975年北京起重运输机械研究所开发了我国首台电磁导引式AGV,国内越來越多的科研院所和匸厂开始研究和应用AGV,中科院开发的AGV系统成功应用汽乍生产线实现门动化装配,华晨宝马汽拦公司总装乍间装备AGV
6、的生产线已投入生产运行状态良好,沈阳新松机翕人公司研发了系列化的AGV.昆船公司从国外引进了AGV并占领国内部分市场,牛产AGV的公司也越來越艮虽然AGV已经广泛应用丁工业屮,但由丁技术水平的限制导致很多AGV有着控制操作复杂,安全性较差等缺陷,我国的AGV人部分还需要进丨I,进丨1的价格较高而核心技术由外国掌控,制约了国内AGV公司的发展,国产AGV的性能还有待进一步提高冋。现代电子计算机技术的快速发展不断促进AGV技术的提高,现在的AGV功能和性能越來越优良,很多先进的AGV上安装有车载计算机、自动物料装卸、无线通信等装置提高了整机和系统的复杂程度和自动化水平,AGV通过中央控制计算机的协
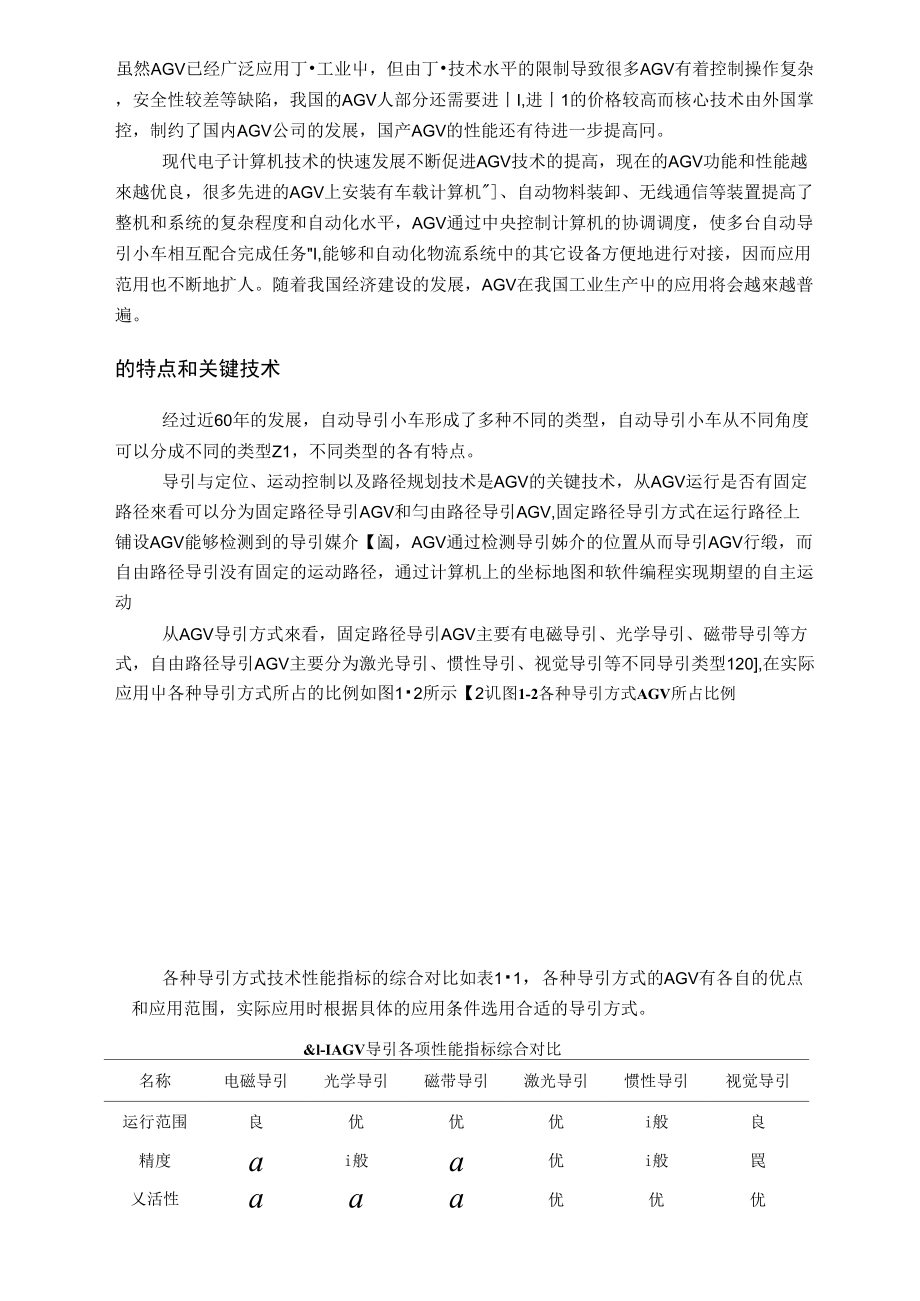
7、调调度,使多台自动导引小车相互配合完成任务I,能够和自动化物流系统中的其它设备方便地进行对接,因而应用范用也不断地扩人。随着我国经济建设的发展,AGV在我国工业生产屮的应用将会越來越普遍。的特点和关键技术经过近60年的发展,自动导引小车形成了多种不同的类型,自动导引小车从不同角度可以分成不同的类型Z1,不同类型的各有特点。导引与定位、运动控制以及路径规划技术是AGV的关键技术,从AGV运行是否有固定路径來看可以分为固定路径导引AGV和勻由路径导引AGV,固定路径导引方式在运行路径上铺设AGV能够检测到的导引媒介【阖,AGV通过检测导引姊介的位置从而导引AGV行缎,而自由路径导引没有固定的运动路
8、径,通过计算机上的坐标地图和软件编程实现期望的自主运动从AGV导引方式來看,固定路径导引AGV主要有电磁导引、光学导引、磁带导引等方式,自由路径导引AGV主要分为激光导引、惯性导引、视觉导引等不同导引类型120,在实际应用屮各种导引方式所占的比例如图12所示【2讥图1-2各种导引方式AGV所占比例各种导引方式技术性能指标的综合对比如表11,各种导引方式的AGV有各自的优点和应用范围,实际应用时根据貝体的应用条件选用合适的导引方式。&l-IAGV导引各项性能指标综合对比名称电磁导引光学导引磁带导引激光导引惯性导引视觉导引运行范围良优优优i般良精度ai般a优i般罠乂活性aaa优优优可靠性优般般i般
9、般般可控性优i般i般-般差优成本差_般差电磁导引AGV在将要运行的路径卜方铺设导引电缆并在电缆中通过交变信号从而产生电戏场,AGV电磁传感器实现磁场导引信号的检测电磁导引方式对环境的要求低、经济实用、导引可靠,因而应用广泛di,是目前最常用的AGV导引方式,在国内,上海人众、奇瑞等汽车公司的汽车生产线以及秦山核电站的核废料处理仓库等场所都是采用了电磁导引式AGV光学导引和磁带导引AGV与电磁导引方式的基本氐理很接近,使用的导引媒介是光学导引带或磁带,AGV通过检测地面反射的光学信号或者磁场信兮实现路径的导引】。这种导引方式在地面贴上导引带即对,施匸布线简单,光学导引对工作环境的要求较严格,石婆
10、作环境亮度符介要求,在干挣无尘、地面、怡光反射规律规范的场地使用较为理想,否则光学传感器在检測反射的光信号时容易产生错误而影响使用,磁带导引同样也应注意避免和减少工作环境对导引信号的干扰。激光导引AGV不緡要对地面进行处理,而是在运行区域的周刖放置一定数最的反射镜,AGV通过安装的激光打描和接收器接收反射回来的激光信号,根据入射光、反射光的夹和和时差计算出AGV的当前位置,并与计算机上的坐标地图数据比较实现导引RS。这种导引方式AGV可实现任意规划的路径行走II.粘度较高,但对工作环境婆求较高、传感与反射装置安装复杂,且计算复杂、成本高。惯性导引AGV通过车载陀螺仪检测的方向偏差信号进行导引,通过行驶方向和距离经过计算來确定AGV的位置并和计算机中坐标地图比较实现导引叽这种方式导引定位较准确,路径组合灵活性好,不足之处在于行走距离较长时误差会积累,需要定期校准】。视觉导引AGV通过摄像头提取AGV周|1;|的环境信息并与计算机中存储的环境地图对比I绚,从而进行定位和导引
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 升降机械项目可行性研究报告(范文)
- 平板显示光刻胶项目可行性研究报告(模板)
- 灌溉自动化与智能决策支持系统考核试卷
- 营养保健品的市场定位与目标消费群考核试卷
- 蜂巢结构与蜜蜂生活考核试卷
- 图书出租业务的远程借阅系统考核试卷
- 羽绒制品生产过程调度优化考核试卷
- 硅冶炼用辅助材料的选用考核试卷
- 煤炭企业财务风险控制措施
- 家长如何制定孩子的学习计划
- 医院“互联网+护理服务”制度
- 顶管施工危险源辨识及风险评价表
- 江苏省扬州市2025届高三第二次模拟考试生物试卷含解析
- 11SG534 带水平段钢斜梯(45°)
- 20232024辽宁大连市西岗区招聘社区工作者24人笔试历年典型考题及考点剖析附带答案详解
- 涂装工考试:中级涂装工考点(三)
- 医院重症监护室感染监控指南
- 2024年高中英语衡水体书法练字字帖
- 融资融券实务
- 人教版二年级下册口算题天天练1000道可打印带答案
- 2022北京东城六年级毕业考英语试题含答案
评论
0/150
提交评论