



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
第三章平面机构的结构分析§3-1
机构的组成§3-2
平面机构运动简图§3-3
平面机构自由度§3-1
机构的组成1.1.运动副1.2.自由度和运动副约束1.3.运动链和机构从运动角度来看,任何机器(或机构)都是由许多独立运动单元体组合而成的,这些独立运动单元体称为构件。
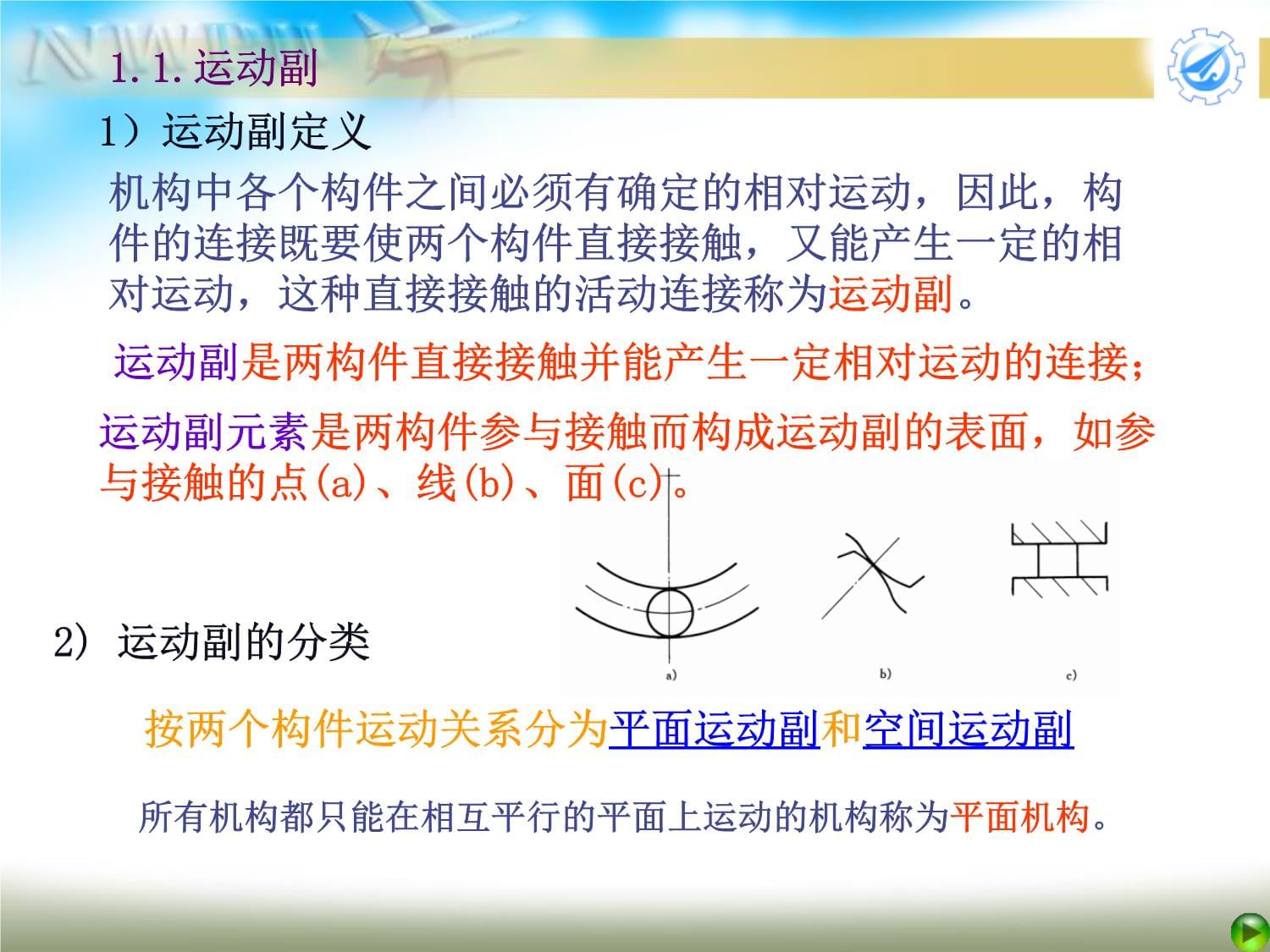
从加工制造角度来看,任何机器(或机构)都是由许多独立制造单元体组合而成零件,这些独立制造单元体称为零件。气缸体连杆曲轴齿轮活塞构件可以是一个零件;也可以是由一个以上的零件组成。图示内燃机中的连杆就是由单独加工的连杆体、连杆头、轴瓦、螺杆、螺母、轴套等零件组成的。这些零件分别加工制造,但是当它们装配成连杆后则作为一个整体运动,相互之间不产生相对运动。复习运动副元素是两构件参与接触而构成运动副的表面,如参与接触的点(a)、线(b)、面(c)。运动副是两构件直接接触并能产生一定相对运动的连接;1.1.运动副机构中各个构件之间必须有确定的相对运动,因此,构件的连接既要使两个构件直接接触,又能产生一定的相对运动,这种直接接触的活动连接称为运动副。1)运动副定义2)运动副的分类按两个构件运动关系分为平面运动副和空间运动副所有机构都只能在相互平行的平面上运动的机构称为平面机构。三、运动副及其分类概念:使两构件直接接触并能产生一定相对运动的可动联接类型:(一)低副
两构件通过面接触而构成的运动副称为低副。根据两构件间的相对运动形式,低副又可分为转动副和移动副。1.转动副
(或铰链)
两构件只能在一个平面内作相对转动限制两个自由度:(两个移动)保留一个自由度(转动)2.移动副
两构件只能沿某一方向线作相对移动的运动副称为移动副。
限制两个自由度:(一个移动,一个转动)保留一个自由度(移动)3.高副
两构件通过点或线接触组成的运动副称为高副。限制一个自由度:(一个移动)保留两个自由度(一个移动,一个转动)1.2自由度和运动副约束(1)自由度一个处于空间自由状态的构件有几个独立运动的参数?都是什么?构件的自由度-----构件相对于参考系具有的独立运动参数的数目两个构件通过运动副连接后,相对运动受到限制。运动副对成副的两构件间的相对运动所加的限制称为约束。引入1个约束条件将减少1个自由度,而约束的多少及约束的特点取决于运动副的形式。
两个构件组成的运动副,通常用三种接触形式联接起来,即点接触、线接触和面接触。按照接触的特性,通常把平面运动副分为低副和高副两大类。1.低副两构件通过面接触组成的运动副称为低副。(1)转动副(2)移动副
转动副移动副(2)运动副低副(曲面接触)低副(平面接触)凸轮高副(点接触)齿轮高副(线接触)2.高副
两构件以点、线的形式相接触而组成的运动副称为高副。齿轮副3)运动副的表示(之一)3)运动副的表示(之二)3.运动链两个以上的构件通过运动副联接而构成的相对可动的系统。闭式运动链(简称闭链)开式运动链(简称开链)平面闭式运动链空间闭式运动链平面开式运动链空间开式运动链平面运动链空间运动链按运动分按结构分运动链4.机构具有固定构件的运动链称为机构。机构常分为平面机构和空间机构两类,其中平面机构应用最为广泛。但当机构安装在运动的机械上时则是运动的。
——按给定已知运动规律独立运动的构件;机架原动件从动件——机构中的固定构件;——机构中其余活动构件。一般机架相对地面固定不动,常以转向箭头表示。其运动规律决定于原动件的运动规律和机构的结构和构件的尺寸。平面铰链四杆机构空间铰链四杆机构机架原动件从动件机架从动件原动件3.2平面机构的运动简图
3.2.1运动副及构件的表示方法
在研究机构运动时,可以不考虑那些与运动无关的因素(如具体结构、外形等等),仅用简单的线条和符号来代表构件和运动副,并按一定比例表示出各运动副的相对位置,这种说明机构各构件间的相对运动关系的简单图形称为机构运动简图
3.2平面机构的运动简图
1.构件构件均用直线或小方块等来表示,画有斜线的表示机架。3.2平面机构的运动简图
2.转动副
构件组成转动副时,如下图表示。图垂直于回转轴线时用图a表示;图面不垂直于回转轴线时用图b表示。表示转动副的圆圈,其圆心必须与回转轴线重合。一个构件具有多个转动副时,则应在两条交叉处涂黑,或在其内画上斜线。3.2平面机构的运动简图
3.移动副两构件组成移动副,其导路必须与相对移动方向一致。3.2平面机构的运动简图
4.平面高副
两构件组成平面高副时,其运动简图中应画出两构件接触处的曲线轮廓,对于凸轮、滚子,习惯划出其全部轮廓;对于齿轮,常用点划线划出其节圆。凸轮滚子齿轮1、运动副的符号转动副:移动副:齿轮副:凸轮副:2、构件(杆):3.2平面机构的运动简图
3.2.2绘制机构运动简图的步骤1)认真研究机构的结构及动作原理,分清固定件(机架),确定主动件。2)绘制机械系统运动循环图。3)测量出运动副间的相对位置。4)选择视图平面和比例尺,用规定的符号和线条表示其构件和运动副,绘制机构运动简图。根据图纸的幅面及构件的实际长度,选择适当的比例尺μL例3.1试绘制内燃机的机构运动简图3.2平面机构的运动简图
例
试绘制内燃机部分的机构运动简图气缸体1活塞2进气阀3排气阀4连杆5曲轴6凸轮7顶杆8齿轮10解:1)分析运动,确定构件的类型和数量
2)确定运动副的类型和数目
3)选择视图平面
4)选取比例尺,根据机构运动尺寸,定出各运动副间的相对位置
5)画出各运动副和机构符号,并表示出各构件3.2平面机构的运动简图
3.3平面机构的自由度3.3.1机构具有确定运动的条件1.基本概念自由度:相对于参考坐标系,构件所具有的独立运动数目称为构件的自由度。或者说:自由度指的是描述运动的独立参数。约束:对构件的独立运动所加的限制称为约束。约束是由运动副提供的。机构的自由度:在指定的参考坐标系内机构所具有的独立运动数目。
平面运动:作平面运动的构件则只有三个自由度,即沿x轴和y轴的移动及在xoy平面内的转动。这三个自由度可以用三个独立的参数x、y和角度θ表示。下面,只就作平面运动的构件进行分析。3.3平面机构的自由度2.运动副的作用:是约束构件间的某些运动,而保留另外一些运动。一个运动副至少引入一个约束,也至少保留一个自由度。◆转动副:沿轴向和垂直于轴向的移动均受到约束,它只能绕其轴线作转动。所以,平面运动的一个转动副引入两个约束,保留一个自由度。3.3平面机构的自由度
◆移动副:限制了构件一个移动和绕平面的轴转动,保留了沿移动副方向的相对移动,所以平面运动的一个移动副也引入两个约束,保留一个自由度。3.3平面机构的自由度◆高副一个平面高副引入一个约束,保留两个自由度。3.3平面机构的自由度综上所述,平面机构中,每个低副引入两个约束,使构件失去两个自由度;每个高副引入一个约束,使构件失去一个自由度。3.3平面机构的自由度1.计算公式n:机构中活动构件数;
Pl
:机构中低副数;
Ph:机构中高副数;F
:机构的自由度数;F=3n-2Pl-Ph
设则3.3平面机构的自由度注:一个平面运动链包含N个构件,其中1个构件为机架,则n=N-1个活动构件3.3平面机构的自由度2.实例分析
不能运动3.3平面机构的自由度给定构件1运动参数,构件2、3的运动是确定的。如图所示为五构件运动链。若给定一个原动件(构件1)的角位移规律为φ1=φ1(t),此时构件2、3、4的运动并不能确定。只有给出两个原动件,使构件1、4都处于给定位置,才能使从动件获得确定运动。3.3平面机构的自由度结论
平面机构具有确定运动的条件:机构原动件个数应等于机构的自由度数目。
原动件数<自由度数,机构无确定运动
原动件数>自由度数,机构在薄弱处损坏
3.3平面机构的自由度机构要能运动,它的自由度必须大于零。机构的自由度表明机构具有的独立运动数。由于每一个原动件只可从外界接受一个独立运动规律(如内燃机的活塞具有一个独立的移动)因此,当机构的自由度为1时,只需有一个原动件;当机构的自由度为2时,则需有两个原动件。故机构具有确定运动的条件是:原动件数目应等于机构的自由度数目。F≤0,构件间无相对运动,不成为机构。F>0,原动件数=F,运动确定原动件数<F,运动不确定原动件数>F,机构破坏3.计算实例
n=3,Pl=4,Ph=0F=3n–2Pl–Ph
=3×3–2×4–0=1解:3.3平面机构的自由度F=3n-2PL-PH=3*7-2*8-4=13.计算实例
n=3,Pl=4,Ph=0F=3n-2Pl-Ph
=3×3-2Pl-Ph
=3×3-2×4-0=13.3平面机构的自由度3.3
平面机构自由度的计算1计算公式F=3n-(2pl+ph)式中:n为机构的活动构件数目;pl
为机构的低副数目;ph为机构的高副数目。2举例1)铰链四杆机构F=3n-(2pl+ph)=3×3-2×4-0=12)铰链五杆机构F=3n-(2pl+ph)=3×4-2×5-0=23.4
计算平面机构自由度时应注意的事项?复合铰链:两个以上构件在同一处用转动副相连接,该处则构成复合铰链。复合铰链处的运动副数目为:K-1(K为构成复合铰链的构件数目)。3.4.1
自由度计算时应注意的几种情况
3.4
计算平面机构自由度时应注意的事项F=3n-2PL-PH=3*5-2*6-0=3F=3n-2PL-PH=3*5-2*7-0=1局部自由度:机构中与输出构件的运动无关的自由度称为局部自由度(或称多余自由度),计算自由度时应减去。如图中滚子绕从动杆端部转动并不影响其它构件的运动,因而是局部自由度,在计算机构自由度时局部自由度应除去不计。局部自由度3.4
计算平面机构自由度时应注意的事项F=3n-2PL-PH=3*3-2*3-1=2F=3n-2PL-PH=3*2-2*2-1=1多余的自由度是滚子2绕其中心转动带来的局部自由度,它并不影响整个机构的运动,在计算机构的自由度时,应该除掉。2、局部自由度
在机构中,某些构件具有不影响其它构件运动的自由度虚约束:对机构起重复约束作用的约束称为虚约束或消极约束,计算自由度时应去掉构成虚约束的构件及运动副。(1)、两构件构成多个导路平行的移动副,F=3n-2PL-PH=3*3-2*5-0=-1(2)、两构件组成多个轴线互相重合的转动副3.4
计算平面机构自由度时应注意的事项(3)、机构中存在对传递运动不起独立作用的对称部分F=3n-2PL-PH=3*5-2*5-4=1F=3n-2PL-PH=3*4-2*4-2=24、轨迹重合:在机构中,若被联接到机构上的构件,在联接点处的运动轨迹与机构上的该点的运动轨迹重合时,该联接引入的约束是虚约束,F=3n-2PL-PH=3*4-2*6-0=0F=3n-2PL-PH=3*3-2*4-0=1虚约束作用:对机构的运动无关,但可以改善机构的受力情况,增强机构工作的稳定性
图示为一简易冲床的设计图。试分析设计方案是否合理。如不合理,则绘出修改后的机构运动简图。
1.两构件未组成运动副前,连接点处的轨迹已重合为一,组成的运动副存在虚约束。
◆计算
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2024-2029年身份证和信用卡打印机行业市场现状供需分析及市场深度研究发展前景及规划投资研究报告
- 2024-2029年超级塑胶模具钢行业发展分析及投资价值研究咨询报告
- 2024-2029年起落架行业市场现状供需分析及重点企业投资评估规划分析研究报告
- 2024-2029年负载分接开关(LTC)过滤系统行业市场现状供需分析及重点企业投资评估规划分析研究报告
- 2024-2029年试验架行业市场现状供需分析及重点企业投资评估规划分析研究报告
- 2024-2029年视频管理软件行业市场现状供需分析及重点企业投资评估规划分析研究报告
- 2024-2029年血压监测试验行业市场现状供需分析及市场深度研究发展前景及规划投资研究报告
- 2024-2029年蛋清蛋白粉行业市场现状供需分析及市场深度研究发展前景及规划投资研究报告
- 2024-2029年落地式红外加热器行业市场现状供需分析及市场深度研究发展前景及规划投资研究报告
- 2024-2029年药品热熔挤出机行业市场现状供需分析及重点企业投资评估规划分析研究报告
- 幼儿园民政年检工作报告
- 2024年西藏自治区拉萨市中考模拟地理试题
- 2024中考道法重要时事热点
- 软件工程(山东科技大学)智慧树知到期末考试答案章节答案2024年山东科技大学
- 无人机装调与应用试题1-600试题及答案
- 已使用牙膏原料目录
- 初中数学秒题技巧课件
- 2024届北京四中重点中学中考历史模试卷含解析
- 2024届山东省东营地区中考历史押题卷含解析
- 2024年大学计算机基础考试题库附参考答案(完整版)
- 体外冲击波疼痛治疗的进展
评论
0/150
提交评论