


版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系1设计控制系统应完成哪些工作?设计控制系统应完成哪些工作?控制对象运动规律的描述控制对象运动规律的描述控制对象运动规律定性分析控制对象运动规律定性分析控制对象运动规律定量分析控制对象运动规律定量分析控制系统的设计与综合控制系统的设计与综合控制对象控制对象和和控制系统控制系统的的数学模型数学模型2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系2第二章 控制系统的数学模型2.1 2.1 控制系统的运动方程控制系统的运动方程2.2 2.2 线性系统的频域模型线性系统的频域模型2.3 2.3
2、 方框图与信号流图方框图与信号流图2.4 2.4 状态空间与状态空间表达式状态空间与状态空间表达式2.5 2.5 控制系统不同模型间的关系控制系统不同模型间的关系小小 结结2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系3本章学习要点简单物理系统的微分方程的列写;简单物理系统的微分方程的列写;非线性模型的线性化方法;非线性模型的线性化方法;传递函数和传递函数矩阵的概念;传递函数和传递函数矩阵的概念;结构图和信号流图的变换与化简;结构图和信号流图的变换与化简; 状态空间与状态空间表达式;状态空间与状态空间表达式;控制系统不同模型形式及其之间的转换。控制系统不同模型
3、形式及其之间的转换。2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系42.1 控制系统的运动方程dttduCtitutRidttdiLtuccr)()()()()()( 例例2.1.12.1.1研究研究RLCRLC电路,试找出输出电压电路,试找出输出电压u uc c(t)(t)随输入随输入电压电压u ur r(t)(t)变化的规律。变化的规律。解解R R、C C、L L以及初以及初始始u uc c(0)(0)确定时确定时, ,已已知知u ur r(t)(t)就可以确就可以确定定u uc c(t)(t)()()()(22tutudttduRCdttudLCrccc
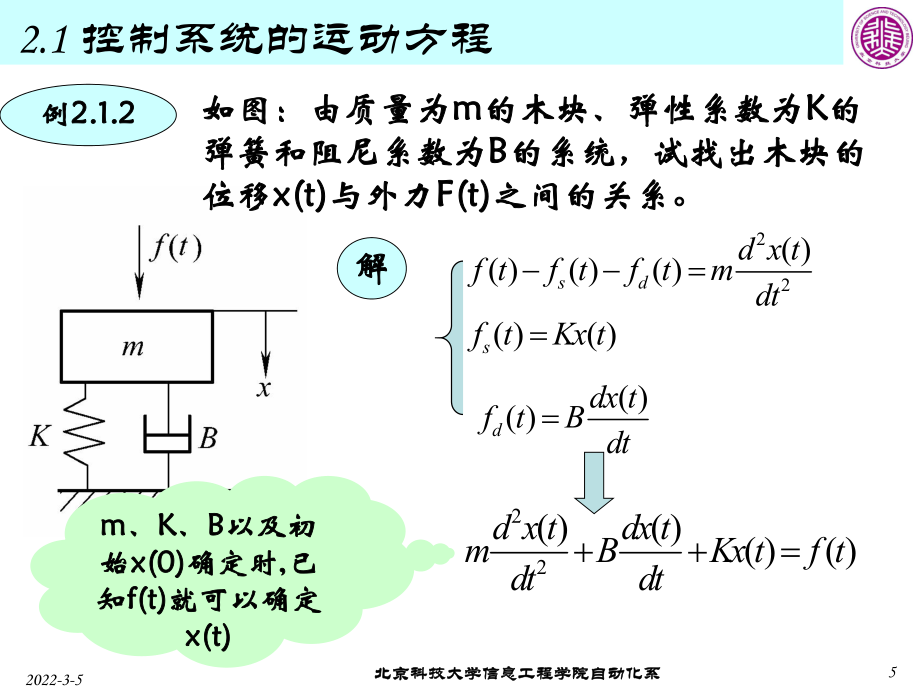
4、 2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系52.1 控制系统的运动方程例例2.1.22.1.2如图:由质量为如图:由质量为mm的木块、弹性系数为的木块、弹性系数为K K的的弹簧和阻尼系数为弹簧和阻尼系数为B B的系统,试找出木块的的系统,试找出木块的位移位移x(t)x(t)与外力与外力F(t)F(t)之间的关系。之间的关系。( ) ( )ddx tf tBdt22( )( )( )( )d x tdx tmBKx tf tdtdt22( )( )( )( ) sdd x tf tf tf tmdt( )( )sf tKx t解解mm、K K、B B以及初
5、以及初始始x(0)x(0)确定时确定时, ,已已知知f(t)f(t)就可以确定就可以确定x(t)x(t)2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系62.1 控制系统的运动方程 直流他励电动机直流他励电动机电枢电路,取电枢电压电枢电路,取电枢电压u ua a为输入量为输入量, ,电动机角电动机角速度速度m m为输出量为输出量, ,讨论讨论它们之间的关系。它们之间的关系。aaaaaaEtiRdttdiLtu )()()(电枢回路电压平衡方程:电枢回路电压平衡方程:电磁转矩方程:电磁转矩方程:ammtiCM)( 电动机轴上的转矩平衡方程:电动机轴上的转矩平衡方程
6、:)()()()()()()()(22tMRdttdMLtuCtCCfRdttdJRfLdttdJLcacaammemmammamamma )()()()(tMtMtfdttdJcmmmmm 例例2.1.32.1.3解解电枢反电势电枢反电势)(tCEea 是电枢电流产生的电动是电枢电流产生的电动转矩转矩是电动机转矩系数是电动机转矩系数mMmC是折合到电动机轴上的总负载转矩是折合到电动机轴上的总负载转矩(t)McJm:Jm:电动机和负载折合到电动机轴上的转动惯电动机和负载折合到电动机轴上的转动惯量;量;fm:fm:电动机和负载折合到电动机轴上的黏电动机和负载折合到电动机轴上的黏性摩擦系数;性摩擦
7、系数;2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系72.1 控制系统的运动方程 注意观察三个示例的微分方程注意观察三个示例的微分方程 可以通过求解得到可以通过求解得到ur(t)uc(t),f(t)x(t)之间内在运之间内在运动的关联关系、分析系统的运动特性。动的关联关系、分析系统的运动特性。 进而改造系统进而改造系统-选择适当的选择适当的R、L、C和和m、B、K得得到希望的运动规律。到希望的运动规律。 许多表面上看来似乎毫无共同之处的控制系统,其许多表面上看来似乎毫无共同之处的控制系统,其物理背景可能完全一样,物理背景可能完全一样, 可以用一个运动方程来可以
8、用一个运动方程来表示,我们可以不单独地去研究具体系统而只分析表示,我们可以不单独地去研究具体系统而只分析其数学表达式,即它们具有相同的其数学表达式,即它们具有相同的数学模型数学模型。这类。这类系统被称为系统被称为相似系统相似系统。2.1.32.1.22.1.1例例例)()()()()()()()()()()()()()()()(222222tMRdttdMLtuCtCCfRdttdJRfLdttdJLtftKxdttdxBdttxdmtutudttduRCdttudLCcacaammemmammamammarccc2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系
9、82.1 控制系统的运动方程控制控制系统系统的运动的运动对系统施加控制(即输入控制信号),对系统施加控制(即输入控制信号),从而得到系统输出量(即受控量)随时间的变化规律从而得到系统输出量(即受控量)随时间的变化规律(即输出响应信号)。(即输出响应信号)。控制系统的运动方程控制系统的运动方程根据描述系统特性的物理学定律,根据描述系统特性的物理学定律,如机械,电气,热力,液压等方面的基本定律写出。如机械,电气,热力,液压等方面的基本定律写出。展示系统在运动过程中各变量之间的相互关系,既定展示系统在运动过程中各变量之间的相互关系,既定性又定量地描述整个系统的运动过程。性又定量地描述整个系统的运动过
10、程。 数学模型数学模型描述系统内部物理量(或变量)之间的数学描述系统内部物理量(或变量)之间的数学表达式,表达式,是分析和设计自动控制系统的基础。是分析和设计自动控制系统的基础。静态模型:静态模型:在静态条件下(即变量不随时间变化),描述变在静态条件下(即变量不随时间变化),描述变量之间关系的代数方程量之间关系的代数方程(组组)。动态模型:动态模型:描述变量各阶导数之间关系的微分方程描述变量各阶导数之间关系的微分方程(组组)。2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系92.1 控制系统的运动方程建立数学模型的方法建立数学模型的方法解析法解析法 依据描述系统
11、运动规律的运动定律来得依据描述系统运动规律的运动定律来得到微分方程的方法。到微分方程的方法。实验法实验法 基于系统输入输出的实验数据来建立数基于系统输入输出的实验数据来建立数学模型的方法。学模型的方法。数学模型的形式数学模型的形式时域模型时域模型微分方程、差分方程和状态方程;微分方程、差分方程和状态方程;复频域模型复频域模型传递函数、结构图、频率特性。传递函数、结构图、频率特性。2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系102.1 控制系统的运动方程 问题:从严格意义上讲,绝大多数系统的数学模型都问题:从严格意义上讲,绝大多数系统的数学模型都不是线性模型(
12、即系统并非是线性系统)。事实上,不是线性模型(即系统并非是线性系统)。事实上,任何一个元件总是存在一定程度的非线性。即使假设任何一个元件总是存在一定程度的非线性。即使假设具有线性的特性,也是局限在一定的范围内。具有线性的特性,也是局限在一定的范围内。几几种种常常见见的的非非线线性性2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系112.1 控制系统的运动方程两类非线性系统两类非线性系统具有具有连续变化连续变化的非线性系统的非线性系统 动态:动态:y(n)=f(t;y,y(1),y(n-1),x,x(1),x(m) 静态:静态:y=f(x)本质本质非线性系统非线性
13、系统 2),(1),(2),;(1),;(21)()1(2)()1(1)(条条件件条条件件静静态态:条条件件条条件件动动态态:xtfxtfyxxyyytfxxyyytfynnnnn2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系122.1 控制系统的运动方程 非线性微分方程的求解很困难。非线性微分方程的求解很困难。在一定条件下在一定条件下,近,近似地转化为线性微分方程,可以使系统的动态特似地转化为线性微分方程,可以使系统的动态特性的分析大为简化。实践证明,这样做能够圆满性的分析大为简化。实践证明,这样做能够圆满地解决许多工程问题,有很大的实际意义。地解决许多工程
14、问题,有很大的实际意义。线性化的方法线性化的方法忽略忽略弱弱非线性环节非线性环节:如果元件的非线性因素较弱或者不:如果元件的非线性因素较弱或者不在系统线性工作范围以内,则它们对系统的影响很小,在系统线性工作范围以内,则它们对系统的影响很小,就可以忽略。就可以忽略。 台劳级数展开法台劳级数展开法(小偏差法,切线法,增量线性化法小偏差法,切线法,增量线性化法):适用前提适用前提假设在控制系统的整个调节过程中,各个元假设在控制系统的整个调节过程中,各个元件的输入和输出量只是在平衡点附近作微小变化。件的输入和输出量只是在平衡点附近作微小变化。2022-3-5北京科技大学信息工程学院自动化系北京科技大学
15、信息工程学院自动化系132.1 控制系统的运动方程202200)(!21)()(00 xxdxydxxdxdyyxfyxx0yyy 0 xxx 0 xdxdyk 忽略二次以上的各项,上式可以写成:忽略二次以上的各项,上式可以写成:A(x0,y0)平衡点,函数在平平衡点,函数在平衡点处连续可微,则可将函衡点处连续可微,则可将函数在平衡点附近展开成台劳数在平衡点附近展开成台劳级数:级数:xky其中:其中:非线性元件的线性化数学模型非线性元件的线性化数学模型2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系142.1 控制系统的运动方程平均斜率法平均斜率法:如果一非线性
16、元件输入输出关系如下图:如果一非线性元件输入输出关系如下图所示,此时不能所示,此时不能台劳级数展开法台劳级数展开法,可用平均斜率法得,可用平均斜率法得线性化方程为线性化方程为 :kxy 11xyk 0 xyx1y1-x1-y1其中:其中:2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系152.1 控制系统的运动方程注意:注意:这几种方法只适用于一些非线性程度较低的系统,这几种方法只适用于一些非线性程度较低的系统,对于某些严重的非线性(本质非线性对于某些严重的非线性(本质非线性)不能作线性化处不能作线性化处理,一般用理,一般用相平面法相平面法及及描述函数法描述函数
17、法进行分析。进行分析。(此部分此部分超出本课程的内容,可参考非线性控制的章节或教超出本课程的内容,可参考非线性控制的章节或教材。材。)2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系162.1 控制系统的运动方程例例2.1.42.1.4 水位自动控制系统水位自动控制系统输入量为输入量为Q1 ,输出量为水位输出量为水位H,求水箱的微分方程。,求水箱的微分方程。水箱的横截面积为水箱的横截面积为C,R表示流阻。表示流阻。2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系17RHQ 2根据托里拆利定理,出水量与水位高度平方根成正比,则有:根
18、据托里拆利定理,出水量与水位高度平方根成正比,则有:R 1其中其中 为比例系数。为比例系数。水箱的线性化微分方程水箱的线性化微分方程: :整理得水箱的标准线性化微分方程为整理得水箱的标准线性化微分方程为: :22002001()2HQQHHQRH RRHR 02其中:其中:显然这个式子为非线性关系显然这个式子为非线性关系, , 在工作点在工作点 附近进行台劳级数附近进行台劳级数展开。取一次项得:展开。取一次项得:2.1 控制系统的运动方程解解在在 时间中,水箱内流体变化量时间中,水箱内流体变化量 . .则:则:dtCdH12()CdHQQ dt010120()()HCd HHQQQdtR注意:
19、注意: 是常数;是常数; 。0H1020QQ1d HHCQdtR 2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系182.1 控制系统的运动方程说明说明 本质非线性系统一般不可线性化。本质非线性系统一般不可线性化。 多变量情况处理类似。多变量情况处理类似。 工作点不同,所得线性化方程的线性化系工作点不同,所得线性化方程的线性化系数不同,即线性化方程不同。数不同,即线性化方程不同。 非线性系统的线性化方程只在非线性系统的线性化方程只在工作点附近工作点附近才成立才成立 。2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系192.2 线性
20、系统的复数域模型2.2.1 2.2.1 拉普拉斯变换拉普拉斯变换2.2.2 2.2.2 传递函数传递函数2.2.3 2.2.3 传递函数矩阵传递函数矩阵2.2.4 2.2.4 典型元部件及典型环节的传递函典型元部件及典型环节的传递函数数问题:问题: 1)微分方程求解比较困难,不利于工程实现;)微分方程求解比较困难,不利于工程实现; 2)有时分析控制系统的性质时不必求解方程;)有时分析控制系统的性质时不必求解方程; 是否有更方便的形式描述系统?是否有更方便的形式描述系统?2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系202.2 线性系统的复频域模型 拉氏变换法是
21、一种数学积分变换,其核心是把时拉氏变换法是一种数学积分变换,其核心是把时间函数间函数f(t)与复变函数与复变函数F(s)联系起来,把时域问题通过联系起来,把时域问题通过数学变换为复频域问题,把时间域的高阶微分方程变数学变换为复频域问题,把时间域的高阶微分方程变换为复频域的代数方程以便求解。换为复频域的代数方程以便求解。 )( ) s ( tfF 简简写写对应对应 时域函数时域函数f f( (t t)( )(原函数原函数) )复频域函数复频域函数F(s)(F(s)(象函数象函数) ) js s s为复频率为复频率2.2.1 2.2.1 拉普拉斯变换拉普拉斯变换2022-3-5北京科技大学信息工程
22、学院自动化系北京科技大学信息工程学院自动化系212.2 线性系统的复频域模型 ) s (21)( )() s (0dseFjtfdtetfFstjcjcst 正变换正变换反变换反变换 )( )()( )( SFtftfSF1简简写写正变换正变换反变换反变换象函数象函数F F(s) (s) 用大写字母表示用大写字母表示, ,如如I I(s)(s),U U(s)(s)。原函数原函数f f(t) (t) 用小写字母表示,如用小写字母表示,如 i i(t), (t), u u(t)(t)。1 12 2象函数象函数F F(s) (s) 存在的条件:存在的条件: dtetfst0)(为为收收敛敛因因子子t
23、es 拉氏变换的定义拉氏变换的定义t t 0 0 , f, f( (t t)=0)=02022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系222.2 线性系统的复频域模型如果存在有限常数如果存在有限常数MM和和c c使函数使函数f f( (t t) )满足:满足:), 0 )( tMetfctdtMedtetftct 00)s (s)(CM s则则 总可以找到一个合适的总可以找到一个合适的s s值使上式积分为值使上式积分为有限值,即有限值,即f f( (t t) )的拉氏变换式的拉氏变换式F(s)F(s)总存在。总存在。2022-3-5北京科技大学信息工程学院自动化
24、系北京科技大学信息工程学院自动化系232.2 线性系统的复频域模型典型函数的拉氏变换典型函数的拉氏变换 (1)(1)单位阶跃函数的象函数单位阶跃函数的象函数)()(ttfdtettsFst0)()()( s1 (2)(2)单位冲激函数的象函数单位冲激函数的象函数)()(ttf 1)()()(0dtettsFst (3)(3)指数函数的象函数指数函数的象函数ate)t (f asdteeesFstatat1)(0 2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系242.2 线性系统的复频域模型(4)(4)正正弦弦函数的象函数函数的象函数ttfsin)(220sin
25、sin)(sdte ttsFst (5)(5)余弦函数的象函数余弦函数的象函数ttfcos)(2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系252.2 线性系统的复频域模型拉普拉斯变换的基本性质拉普拉斯变换的基本性质线性性质线性性质)()()()(2211sFtfsFtf , 若(s)FA(s)FA2211 )t(f)t(f2211AA 则则时间比例性质(相似定理)时间比例性质(相似定理)则),()( 若sFtf:( )()tL fFS其中其中为实常数为实常数2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系262.2 线性系统的
26、复频域模型微分性质微分性质时域导数性质时域导数性质)(ss 0)()(fFdttdf则)()( sFtf若:频域导数性质频域导数性质)()(s Ftf设:ss ddFttf)()(则:)0()0()0()()()1()1(21nnnnnnffsfssFsdttfd)()(sFsdttfdnnn则:则:如果:如果:0)0()0()0()1()1( nfff2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系27积分性质积分性质)()(sFtf 设设:)(1)(0sFsdttf t 则:则:延迟性质延迟性质)()(sFtf 设设:)()(00sFettf st 则则:)
27、()(tfeLSFt 频域延迟频域延迟时域延迟时域延迟在时间域的平移变换在复数域有对应的衰减变换。在时间域的平移变换在复数域有对应的衰减变换。时间信号时间信号f(t)f(t)在时间域的指数衰减,其拉氏变换在在时间域的指数衰减,其拉氏变换在复数域有对应的坐标平移。复数域有对应的坐标平移。2.2 线性系统的复频域模型2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系28)(lim)(lim)0(0SSFtffst )(lim)(lim)(0SSFtffst 初值定理初值定理f f( (t t) )和和 的拉氏变换存在,的拉氏变换存在, 也存在,也存在,则则dttdf)
28、( )limsSF S终值定理终值定理存在时存在时)(limtft f f( (t t) )和和 的拉氏变换存在,的拉氏变换存在, ,并且除在原点处唯一的极点外,并且除在原点处唯一的极点外,SF(S)SF(S)在包含在包含jj轴轴的右半平面是解析的(即的右半平面是解析的(即tt时,时,f(t)f(t)为常数),为常数),则则dttdf)(时域函数的初值,可以由变换域求得。时域函数的初值,可以由变换域求得。时域函数的终值,也可以由变换域求得。时域函数的终值,也可以由变换域求得。2.2 线性系统的复频域模型2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系292.2
29、线性系统的复频域模型例例2.2.12.2.1)()()()()(0)(0)1(1)(tubtubtyatyatymmnnn 已知微分方程如下,试求已知微分方程如下,试求初值皆为零时初值皆为零时输输出量的拉氏变换与输入的拉氏变换之比。出量的拉氏变换与输入的拉氏变换之比。解解)()()()()(0011sUbsUsbsYasYsasYsmmnnn 01101)()(asasbsbsbsUsYnnnmmmm 0)0()0()0()1()1( nyyy初值皆为零有初值皆为零有由微分性质对微分方程作拉氏变换得:由微分性质对微分方程作拉氏变换得:2022-3-5北京科技大学信息工程学院自动化系北京科技大学
30、信息工程学院自动化系302.2 线性系统的复频域模型拉普拉斯反变换的求法拉普拉斯反变换的求法(1)(1)按定义按定义dsesFjtfstjcjc)(21)( (2)(2)对简单形式的对简单形式的F(s)F(s)可以查拉氏变换表得原函数可以查拉氏变换表得原函数(P28)(P28)f(t)f(t)F(s)F(s)f(t)f(t)F(s)F(s)(t)(t)1 1SintSint1(t)1(t)1/s1/sCostCostt t1/(s+a)1/(s+a)21 sate)(22s)(22ssteatsinteatcos22)( as22)(asas2022-3-5北京科技大学信息工程学院自动化系北京
31、科技大学信息工程学院自动化系31)()()()(2sFsFsFsFn1 )()()()(21tftftftfn (4)(4)把把F(S)F(S)分解为简单项的组合分解为简单项的组合部分分式部分分式展开法展开法(3)(3)利用拉氏变换的性质利用拉氏变换的性质的原函数。的原函数。求求其原函数为其原函数为已知:已知:)(sin)(,)(22asFttfssF 解解由延迟性质知:由延迟性质知:tetfeasFatat sin)()(1 思考思考的原函数的原函数22)()s ( asasF2.2 线性系统的复频域模型例例2.2.22.2.22022-3-5北京科技大学信息工程学院自动化系北京科技大学信息
32、工程学院自动化系32为为真真分分式式,设设)(sFmn 利用部分分式可将利用部分分式可将F F(s)(s)分解为:分解为:象函数的一般形式:象函数的一般形式:)( ssss) s (U) s (Y) s (011011mnaabbbFnnnmmmm nnpskpskpsksF 2211)(tpntptpnekekektf 2121)(待定常数待定常数nUppn0) s (1 个个单单根根分分别别为为有有若若1)( ps)( ps)( ps)( ps2.2 线性系统的复频域模型2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系332.2 线性系统的复频域模型、n、i
33、 pssFkipsii321)( 待定常数的确定:待定常数的确定:方法方法1 1方法方法2 2) s (U)ps)(s (Ylimpisiik ) s (U) s (Y)ps)(s (Ylimp isi)p(U)p(Yii 求极限的方法求极限的方法2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系342.2 线性系统的复频域模型6554)(2 ssssF例例2.2.32.2.3求如下象函数的原函数。求如下象函数的原函数。解解3s2s21 KK33s5s421 SK72s5s43s2 K解法解法1 16s5s5s4) s (2 F)(7)(3)(32tetetftt
34、 35s25s4)p(D)p(NK2s111 75s25s4(pD)p(NK3s222 )解法解法2 2原函数的一般形式:原函数的一般形式:tpnntptpnepDpNepDpNepDpNtf)()()()()()()(221121 2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系352.2 线性系统的复频域模型一对共轭复根为一分解单元一对共轭复根为一分解单元,设:设: jj21pp)()(2) s (D)s)(s () s (N) s (D) s (N) s (112221sDsNssBsAjjF ) s (D) s (N)(s)(K)(sK11222221
35、sBKKAK 221, 222112212221121arccosarccos)()sin()(cossin)(KKKtftKKetfteKteKtfttt 其中:有有共共轭轭复复根根若若0) s (U 22022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系362.2 线性系统的复频域模型例例2.2.42.2.4解解)(52)(2tfssssF的的原原函函数数求求 jp,的的根根: ss22222)1(12)1(1 ssstetetftt2sin212cos)( ).cos(. tet2222)1(1152)( ssssssF)0()4 .632sin(118. 1
36、 ttet2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系372.2 线性系统的复频域模型nnnnnmmmmbbbF)ps (K)ps (K)ps (KpsK )ps (ss) s (11111121121111011 11)(limK11psnpsnsF)p(s 11)()(limK111psnpsnsFpsdsd 11)()!1(1limK11111psnnnpssF)p(sdsdn 其中:其中:具具有有重重根根若若0) s (U 32022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系382.2 线性系统的复频域模型例例2.2.5
37、2.2.5解解)()()(tfssssF的的原原函函数数求求: )()(sKsKsK sssK)( sssK ssFsdsdK)()( sssdsd)0(344)( tteetftt )()(ssssF2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系392.2 线性系统的复频域模型 n n = =m m 时将时将F F(s)(s)化成真分式和多项式之和化成真分式和多项式之和nnpsKpsKpsKAsF )(小结小结: :由由F F(s)(s)求求f( f(t) t)的步骤的步骤 求真分式分母的根,确定分解单元求真分式分母的根,确定分解单元 将真分式展开成部分分式
38、,求各部分分式的系数将真分式展开成部分分式,求各部分分式的系数 对每个部分分式和多项式逐项求拉氏反变换对每个部分分式和多项式逐项求拉氏反变换)()()(0sDsNAsF 2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系402.2 线性系统的复频域模型例例2.2.62.2.6解解的的原原函函数数求求: sssssF)( sss ss)0()37()()(23 teettftt sssssF)(2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系412.2 线性系统的复频域模型2.2.2 2.2.2 系统的传递函数系统的传递函数(1 1)
39、定义:)定义: 单输入单输出单输入单输出线性定常线性定常动态对象的传动态对象的传递函数递函数G(S)G(S)是是零初值零初值下该对象的输出量的拉普拉斯下该对象的输出量的拉普拉斯变换变换Y(S)Y(S)数与输入量的拉普拉斯变换数与输入量的拉普拉斯变换R(S)R(S)之比。之比。 回答本节开始的问题回答本节开始的问题( )( ) ( )Y SG SR S2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系422.2 线性系统的复频域模型RLCRLC电路电路rcuuiRdtdiLcduiCdt取取u ur r为输入,为输入,u uc c为输出,得为输出,得: :22ccc
40、rd uduLCRCuudtdt拉氏变换得:拉氏变换得: 21crLCsRCsUsUs则传递函数为:则传递函数为:例例2.2.72.2.7解解2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系432.2 线性系统的复频域模型例例2.2.82.2.8解解根据牛顿第二定律,得根据牛顿第二定律,得 22sdd x tf tftftmdt sftKx t ddx tftBdt取外力取外力f(t)f(t)为输入;位移为输入;位移x(t)x(t)为输出为输出 2msBsK X sF s 22d x tdx tmBKx tf tdtdt得微分方程:得微分方程:拉氏变换后得:拉氏
41、变换后得:传递函数为:传递函数为:2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系442.2 线性系统的复频域模型 一般有一般有nm nm 。同一个系统,当输入量和输出量的选择不相同时,可同一个系统,当输入量和输出量的选择不相同时,可能会有不同的传递函数。能会有不同的传递函数。不同的物理系统可以有相同的传递函数不同的物理系统可以有相同的传递函数。传递函数表示系统传递输入信号的能力,反映系统本传递函数表示系统传递输入信号的能力,反映系统本身的动态性能。它只与系统的结构和参数有关,与外身的动态性能。它只与系统的结构和参数有关,与外部作用等条件无关。部作用等条件无关。
42、(2 2)传递函数的性质)传递函数的性质 G(s)G(s)与系统的微分方程有直接联系。与系统的微分方程有直接联系。G(s)G(s)是系统单位脉冲响应的拉氏变换是系统单位脉冲响应的拉氏变换y(t)G(s)(t)u(t)L2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系452.2 线性系统的复频域模型(3)传递函数的常用表示形式)传递函数的常用表示形式 时间常数形式时间常数形式根的形式根的形式01110111.)()()(asasasabsbsbsbsDsNsGnnnnmmmm 2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系462.
43、2 线性系统的复频域模型 212112211221)12()1()12()1()(nllllnkkmjjjjmiisqsqspssssTKsG 212112211221)2()()2()()(nllllnkkmjjjjmiigsspsswswsasKsG 时间常数;时间常数;,其中其中lkjiqpT .;22121nnnmmm 2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系472.2 线性系统的复频域模型(4)传递函数局限)传递函数局限 G(s) G(s)原则上不反映原则上不反映y(0)0y(0)0时的系统的全部运时的系统的全部运动规律动规律. . G(s)G
44、(s)只适用于单输入,单输出系统。只适用于单输入,单输出系统。 G(s) G(s)只适用于线性定常系统只适用于线性定常系统由于拉氏变由于拉氏变换是一种线性变换换是一种线性变换. .2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系482.2 线性系统的复频域模型特征多项式特征多项式:G(s)G(s)的分母多项式的分母多项式D(s)D(s)特征方程特征方程:D(s)=0D(s)=0极点极点/ /特征根特征根:D(s)=0D(s)=0的根的根零点零点:N(s)=0N(s)=0的根的根零极点对消零极点对消系统的阶数系统的阶数:max(n,m)max(n,m),(一般,(
45、一般nmnm)系统的类型系统的类型放大系数放大系数与上述传递函数有关的几个重要概念:与上述传递函数有关的几个重要概念:系统的放大系数系统的放大系数 K K根轨迹放大系数根轨迹放大系数 KgKg零极点图零极点图2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系49G(s) G(s) 的零点、极点表示在的零点、极点表示在S S平面上平面上零极点图零极点图)22)(3()2()(2ssssKsGgG(s)G(s)G(s)G(s)零极点分布图零极点分布图 系统性能系统性能 G(s)G(s)2.2 线性系统的复频域模型2022-3-5北京科技大学信息工程学院自动化系北京科技
46、大学信息工程学院自动化系502.2 线性系统的复频域模型2.2.3 2.2.3 传递函数矩阵传递函数矩阵将传递函数的概念推广到多输入多输出系统,传递将传递函数的概念推广到多输入多输出系统,传递函数函数G(s)推广为传递函数矩阵)推广为传递函数矩阵G(s)。设系统。设系统有有p个输入量、个输入量、q个输出量如下图。个输出量如下图。G(s)u1u2up。y1y2yq。G(s)U(s)Y(s) )()()()()()()()()(G(s)212222111211sgsgsgsgsgsgsgsgsgqpqqpp2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系512.2
47、线性系统的复频域模型例例2.2.92.2.9如图,直流他励电动机;如图,直流他励电动机;u ua a是外加的输入是外加的输入变量电枢电压(伏),变量电枢电压(伏),mm表示电动机的角表示电动机的角转速(弧度转速(弧度/ /秒),为输出量。讨论它们之秒),为输出量。讨论它们之间的关系。间的关系。2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系522.2 线性系统的复频域模型由例由例2.1.32.1.3系统运动方程为:系统运动方程为:)()()()()()()()(22tMRdttdMLtuCtCCfRdttdJRfLdttdJLcacaammemmammamamm
48、a 解解)()()()()()()()(2sMRssMLsUCsCCfRssJRfLssJLcacaammemmammamamma )()()()(1)(2sMsURsLCCCfRsJRfLsJLscaaaeemmamamamam 拉氏变换得:拉氏变换得:整理得:整理得:2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系53 比例环节比例环节21crrRxxKxR )()(sKXsXrcKsXsXsWrc)()()( 控制系统通常由若干个控制系统通常由若干个基本部件基本部件组合而成,这些基本部件组合而成,这些基本部件称为典型环节。称为典型环节。 包括:包括:比例环
49、节比例环节、微分环节微分环节、积分环节积分环节、比例微分环节比例微分环节、一阶惯性环节一阶惯性环节、二阶振荡环节二阶振荡环节和和延迟环节延迟环节。(1 1) 典型环节典型环节2.2 线性系统的复频域模型2.2.4 2.2.4 典型元部件及典型环节的传递函数典型元部件及典型环节的传递函数2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系54比例环节的比例环节的单位阶跃响应单位阶跃响应KsXsXsWrc)()()(ssXr1)(当 时2.2 线性系统的复频域模型2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系55 一阶惯性环节一阶惯性环
50、节( )1( )( )1crXsW sXsTsssXr1)(当 时,01/( )( )( )(1)(1/)1/crAAKK TXsW s Xss Tss sTssT00(1)sK TAsKs sTKTsTssTKATs/11)/1()/1(/11( )(1/ )cX sKssT微分方程是一阶的微分方程是一阶的, ,且输出响应需一定且输出响应需一定的时间才能达到稳态值。的时间才能达到稳态值。其中其中T T为惯性环节的时间常数。为惯性环节的时间常数。2.2 线性系统的复频域模型2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系56惯性环节的惯性环节的单位阶跃响应单位阶
51、跃响应11( )(1/)cXsKssT/( )(1),0t Tcx tKet求拉氏反变换得求拉氏反变换得 2.2 线性系统的复频域模型2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系57 积分环节积分环节( )1( )( )crUsKW sUssTs其中其中K=K=1 1/T /T , T T为积分环节的时间常数,表示积分的快慢程度。为积分环节的时间常数,表示积分的快慢程度。积分环节的积分环节的单位阶跃响应单位阶跃响应2.2 线性系统的复频域模型2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系58 微分环节微分环节sKsUsUsW
52、rc)()()(其中其中K K为微分环节的为微分环节的时间常数,表示微分时间常数,表示微分速率的大小。速率的大小。2.2 线性系统的复频域模型 理想微分环节理想微分环节 一阶微分环节(又称比例微分环节、一阶微分环节(又称比例微分环节、实用微分环节)实用微分环节) 2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系59 二阶振荡环节二阶振荡环节这种环节包括有这种环节包括有两个储能元件两个储能元件,当输入量发生变化时,当输入量发生变化时,两种储能元件的能量相互交换。在阶跃函数作用下,其两种储能元件的能量相互交换。在阶跃函数作用下,其暂态响应可能作周期性的变化。暂态响应
53、可能作周期性的变化。 222( )2nnnW sss式中:式中:n 自然振荡角频率自然振荡角频率 阻尼比阻尼比由二阶微分方程描述的系统。由二阶微分方程描述的系统。2.2 线性系统的复频域模型2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系60当输入量为阶跃函数时,输出量的拉氏变换为:当输入量为阶跃函数时,输出量的拉氏变换为:当当 时,上式特征方程的根为共轭复数。时,上式特征方程的根为共轭复数。1因式分解得:因式分解得:222( )(2)ncnnXss ss2221( )2ncnnsXssss振荡环节的振荡环节的单位阶跃响应单位阶跃响应:输出量为输出量为 :22(
54、 )1sin(1)1ntcnex tt 21arctan2.2 线性系统的复频域模型2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系61 延迟延迟/ /时滞环节时滞环节2.2 线性系统的复频域模型带钢厚度检测环节带钢厚度检测环节 ()cdh th t vl ()crxtx tsrcesXsXsW)()()(写成一般形式写成一般形式 : :零初始条件下,拉氏变换为零初始条件下,拉氏变换为 传递函数为传递函数为 例例)()(sXesXrsc 2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系62时滞环节的输出量时滞环节的输出量 ()cd
55、h th t 232311( )112!3!W sssss时滞环节的传递函数时滞环节的传递函数srcesXsXsW)()()( 对于对于时滞时间很小时滞时间很小的时滞环节,常把它展开成泰勒级数,的时滞环节,常把它展开成泰勒级数,并略去高次项,得:并略去高次项,得:时滞环节时滞环节在一定条在一定条件下可近件下可近似为惯性似为惯性环节!环节!2.2 线性系统的复频域模型2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系632.2 线性系统的复频域模型2.2.4 2.2.4 典型元部件及典型环节的传递函数典型元部件及典型环节的传递函数元部件名称元部件名称传递函数传递函数
56、电位器电位器测速电机测速电机电加热炉电加热炉单容水槽单容水槽双容水槽双容水槽KsG )(KssG )(1)( TsKsG1)( TsKsGseTsKsG 1)(1)()(21221 sTTsTTKsG(2 2) 典型元部件典型元部件(有纯延迟有纯延迟)(也可有延迟,略也可有延迟,略)2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系642.3 方框图与信号流图控制系统的结构图是由许多对信号进行单向运算的控制系统的结构图是由许多对信号进行单向运算的方框和一些信号流向线组成,它包含方框和一些信号流向线组成,它包含4种基本单元。种基本单元。2.3.1 2.3.1 系统动
57、态结构图系统动态结构图 1)信号线)信号线 2)引出点(或测量点)引出点(或测量点)3)比较点(或综合点)比较点(或综合点)4)方框(或环节)方框(或环节)2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系652.3 方框图与信号流图+_ _+_ _+_ _Ka11C s21C s21R1R( )R s( )C s1( )U s1( )Us1( )U s1( )I s1( )I s2( )Is2( )Is2( )Is( )C s(b)1( )i t2( )it1( )u t( )c t( )r t1R2R1C2C(t)iR(t)ur(t)111(t)dti(t)i
58、C1(t)u2111(t)iRc(t)(t)u221(t)dtiC1c(t)222022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系662.3 方框图与信号流图+_ _+_ _+-11C s21R21C s11R( )R s( )C s1( )i t2( )it1( )u t( )c t( )r t1R2R1C2C思考思考:将两部分电路分开分将两部分电路分开分别讨论然后在结合到一起别讨论然后在结合到一起结果和前面得到的是否相结果和前面得到的是否相同同?2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系672.3 方框图与信号流图速度控制
59、系统速度控制系统例例2.3.12.3.12022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系682.3 方框图与信号流图解解(1)比较环节和速度调节器环节)比较环节和速度调节器环节 0rrUsIsR 1111111kkcUsUssIss RRC s式中:式中:00014TR C111RC式中:式中:rufu2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系692.3 方框图与信号流图式中式中10cRKR 110111kCrfsUsKUUssT s整理得整理得 2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化
60、系702.3 方框图与信号流图(2)速度反馈的传递函数)速度反馈的传递函数 fsfUsK n s式中:式中: 为速度反馈系数为速度反馈系数 sfK2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系712.3 方框图与信号流图(3)电动机及功率放大装置)电动机及功率放大装置 dskUsK Us 1dedddUsC n sIsRT s edzmdCIsIsTsn sRdtdnJCiCidtdiLiRnCummzmdddddedemdmmdddCCRJTRLT,2022-3-5北京科技大学信息工程学院自动化系北京科技大学信息工程学院自动化系722.3 方框图与信号流图(
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 认证机构资质审批领域目录、通要求、核查报告(模板)
- 创业灵感测试题及答案
- 成人考试试题及答案
- 2026苏教版六年级数学上册第五单元第7课时《组合图形的面积》教案
- 统编版必修上册《立在地球边上放号》等五四诗歌联读教案-以青春之名奏时代强音
- 护理精神:照亮患者康复之路
- 护理核心制度本土化实践
- 护理实践中的护理管理
- 护理老年护理学知识
- 护理技术中的安宁疗护
- 安全监理策划方案
- 2026年完整版临床三基考试试题及答案
- 2026年技术转移经纪人人才培养与职业资质认定知识考核
- (2026版)建筑施工特种作业人员管理规定课件
- 林长制六项工作制度
- 检验机构轮岗工作制度
- CTT4000用户手册(维护分册)V1.1
- 2024年广东阳江市交通投资集团有限公司招聘笔试参考题库含答案解析
- QCC点焊良率改善提案
- 药品调剂基础:中药处方调剂实操
- 公共体育场田径跑道和足球场建设项目可行性研究报告
评论
0/150
提交评论