


下载本文档
版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、提高伺服系统定位精度的方法 数控机床的定位精度直接影响到机床的加工精度。传统上以步进电动机作驱动机构的机床,由于步进电动机的固有特性,使得机床的重复定位精度可以达到一个脉冲当量。但是,步进电动机的脉冲当量不可能很小,因而定位精度不高。伺服系统的脉冲当量可以比步进电动机系统小得多,但是,伺服系统的定位精度很难达到一个脉冲当量。由于CPU性能已有极大提高,故采用软件可以有效地提高定位精度。我们分析了常规控制算法导致伺服系统定位精度误差较大的原因,提出了分段线性减速并以开环方式精确定位的方法,实践中取得了很好的效果
2、。 一、伺服系统定位误差形成原因与克服办法 通常情况下,伺服系统控制过程为:升速、恒速、减速和低速趋近定位点,整个过程都是位置闭环控制。减速和低速趋近定位点这两个过程,对伺服系统的定位精度有很重要的影响。 减速控制具体实现方法很多,常用的有指数规律加减速算法、直线规律加减速算法。指数规律加减速算法有较强的跟踪能力,但当速度较大时平稳性较差,一般适用在跟踪响应要求较高的切削加工中。直线规律加减速算法平稳性较好,适用在速度变化范围较大的快速定位方式中。 选
3、择减速规律时,不仅要考虑平稳性,更重要的是考虑到停止时的定位精度。从理论上讲,只要减速点选得正确,指数规律和线性规律的减速都可以精确定位,但难点是减速点的确定。通常减速点的确定方法有: (1) 如果在起动和停止时采用相同的加减速规律,则可以根据升速过程的有关参数和对称性来确定减速点。 (2) 根据进给速度、减速时间和减速的加速度等有关参数来计算减速点,在当今高速CPU十分普及的条件下,这对于CNC的伺服系统来说很容易实现,且比方法(1)灵活。 伺服控制时,由软件在每个采样周期判断:若剩余
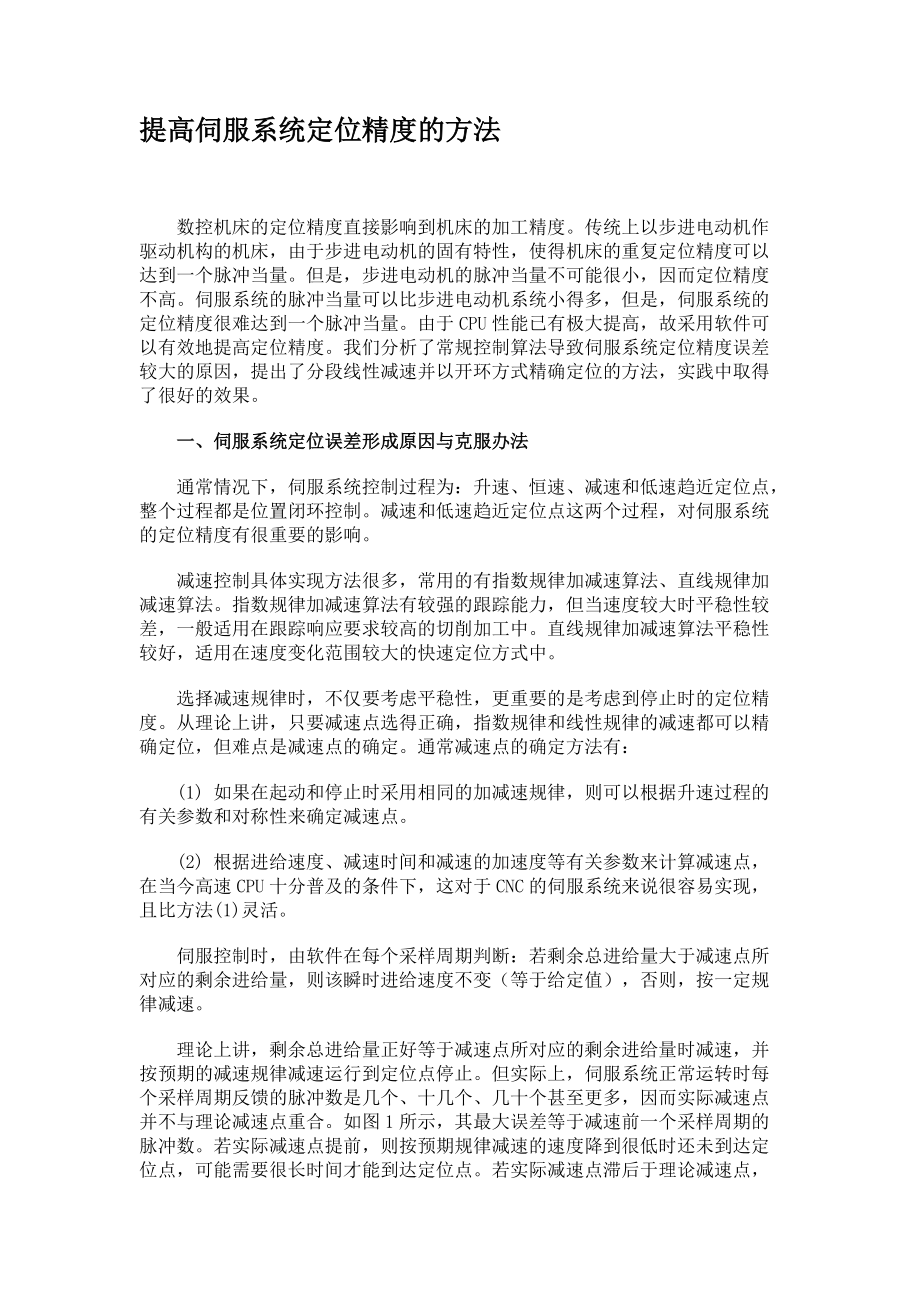
4、总进给量大于减速点所对应的剩余进给量,则该瞬时进给速度不变(等于给定值),否则,按一定规律减速。 理论上讲,剩余总进给量正好等于减速点所对应的剩余进给量时减速,并按预期的减速规律减速运行到定位点停止。但实际上,伺服系统正常运转时每个采样周期反馈的脉冲数是几个、十几个、几十个甚至更多,因而实际减速点并不与理论减速点重合。如图1所示,其最大误差等于减速前一个采样周期的脉冲数。若实际减速点提前,则按预期规律减速的速度降到很低时还未到达定位点,可能需要很长时间才能到达定位点。若实际减速点滞后于理论减速点,则到达定位点时速度还较高,影响定位精度和平稳性。为此,我们提出
5、了分段线性减速方法。图1 减速点误差示意图 在低速趋近定位点的过程中,设速度为V0(mm/s),伺服系统的脉冲当量为(m),采样周期为(ms),则每个采样周期应反馈的脉冲数为:N0=V0/。由于实际反馈的脉冲数是个整数,可能有一个脉冲的误差,即此时速度检测误差最大值为l/N0=/(V0)。采样周期越小、速度越低,则速度检测误差越大。为了满足定位精度是一个脉冲的要求,应使V0很小,使得N01,此时速度检测误差达到100甚至更高。如果此时仍然实行位置闭环控制,必然造成极大的速度波动,严重影响伺服机构的精确定位。所以,我们认为此时应采取位置开环控制,以避免速度波动
6、。 二、分段线性减速精确定位 1、方法与步骤 分段线性减速的特点是减速点不需要精确确定,减速过程速度曲线如图2所示。首先讨论最不利情况,即由伺服系统的最高速度开始减速过程,具体的减速步骤是: (1) 初始速度VG经AB段以加速度a2降速到V2,在BC段以V2匀速运行T2个采样周期,用BC这个时间段来补偿减速点A的误差。A点最大误差是VG对应的一个采样周期的脉冲数NG=VG/,速度为V2时一个采样周期的脉冲数为N2=V2/,则只要保证T2NG/N2=VG
7、/V2,就可以使BC时间段补偿减速点A点的误差。 (2) 速度V2经CD段以加速度a1降速到V1,在DE段以V1匀速运行T1个采样周期,用DE这个时间段来补偿减速点C的误差。类似地,应保证T1V2/V1。由于速度V1较低,假设取V1=5mm/s,脉冲当量=1m,采样周期=1ms,则单位采样周期应反馈的脉冲数为N1=5,速度检测误差最大可达20。所以,从这段过程开始就可以采用开环控制,以避免由于速度检测误差而引起速度波动。值得注意的是,开环控制算法应包括伺服机构的死区补偿和零漂补偿模块。 (3) 速度V1经EF段以加速度a1
8、降速到V0,在FG段以V0匀速运行T0个采样周期,直到到达定位点,这个过程采用位置开环控制。 通常情况下开始减速时伺服系统的速度(假设为VG1)小于最高速度,这时相当于减速起始点A向下移动到A1点,如图2虚线所示。如果初始速度小于V2,如图2中的VG2所示,相当于减速起始点移到了CD段,少了一段减速过程。图2 减速过程速度曲线 程序框图如图3所示,图中R为总剩余进给量(脉冲数),RA、RB、RC、RD、RE、RF分别对应图2减速曲线A、B、C、D、E、F点所对应的剩余进给量(脉冲数),可以由V、a、T、等参数算出。例如:图
9、3 速度控制框图 2、几组参数的确定原则 (1) V0、V1和V2 在常规的减速过程中,减速点的位置误差全靠最后低速趋近阶段来补偿,这样,V0就很不好选取。如果V0选得过小,应保证T0(VG/V0),则需要很长时间才能到达定位点;如果V0选得较大,直接影响定位精度。分段线性减速方法与常规的减速方法相比,增加了BC、DE两个时间段,减速点的位置误差可以在较高速度得到绝大部分的补偿。因此,V0可以选得很小。通常可取伺服系统的最低速度,这样可以提高伺服系统的定位精度。V1、V2可分别取伺服系统最高速度的1%和10%。 (2) a1、a1和a2加速度越大,减速过程越短,但引起的冲击和误差也越大。因此,在高速阶段加速度可取大些,以保证减速过程的快速性;低速阶段应取较小的加速度,以保证定位精度。通常a1的值在数值上可取为与V0相等。 (3) T0、T1和T2由前面分析可知,为了补偿减速点的位置误差,应取T0=KV1/V0,T1=KV2/V1,T2=KVG/V2,式中K为可靠性系数,用来补偿算法的计算误差及其它一些不确定因素的影响,常取K=1.1
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 护肤品生产配方研发与管控工作手册
- 证券交易流程与风险防范手册
- 应急临时安置与生活保障服务手册
- 寒地动脉粥样硬化中医服务指南
- 药品从业人员培训与考核管理手册
- 土木工程防火防腐工程施工手册
- 城市供水特许经营合同二篇
- 必修2 第五课 课时1 坚持公有制为主体
- 2026-2031年中国集装箱码头行业市场调查研究与投资前景分析报告
- 2026年四川应用技术职业学院高职单招职业技能考试题库及答案详解(名师系列)
- 解读慢性阻塞性肺病(GOLD)指南(2026)更新要点课件
- 光伏电站运行维护规程
- THIS001-2022红外热电堆传感器
- 外墙水包砂质保合同范本
- 肢体创伤后水肿管理指南解读
- 招标代理业务管理规范与操作指南
- 旅游直播培训课件
- T/CAPA 3-2021毛发移植规范
- 急诊治疗过程中的医患沟通技巧
- 旅游客车交通安全检查
- 金属基体上的金属覆盖层 电沉积和化学沉积层 附着强度试验方法评述
评论
0/150
提交评论