



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、无刷直流电机驱动James P. Johnson, Caterpille 1公司本章的题目是无刷直流电动机及其驱动。无刷直流电动mBLDC)的运行仿效了有刷 并励直流电动机或是永磁直流电动机的运行。通过将原直流电动机的定子、转子内外对调 一变成采用包含电枢绕组的交流定子和产生磁场的转子使得该仿效得以可能。正如本章中 要进一步讨论的,输入到BLDC定子绕组中的交流电流必须与转子位置同步更变,以便保 持磁场定向,或优化定子电流与转子磁通的相互作用,类似于有刷直流电动机中换向器、 电刷对绕组的作用。该原理的实际运用只能在开关电子学新发展的今天方可出现。BLDC 电机控制是今天世界上发展最快的运动控制
2、技术。可以预见,随着BLDC的优点愈益被大 家所熟知且燃油成本持续增加,BLDC必然会进一步广泛运用。2018-01-3023.1 BLDC基本原理在众文献中无刷直流电动机有许多定义。NEMA标准运动/定位控制电动机和控制 中对“无刷直流电动机”的定义是:“无刷直流电动机是具有永久磁铁转子并具有转轴位 置监测来实施电子换向的旋转自同步电机。不论其驱动电子装置是否与电动机集成在一起 还是彼此分离,只要满足这一定义均为所指。”单定于辑向碰通图)图23.1无刷直流电机构形2018-01-31若干类型的电机和驱动被归类于无刷直流电机,它们包括:1永磁同步电机PMSMs);2梯形反电势(back - E
3、MF表面安装磁铁无刷直流电机;3正弦形表面安装磁铁无刷直流电机;4内嵌式磁铁无刷直流电机;5电机与驱动装置组合式无刷直流电机;6轴向磁通无刷直流电机。图23.1给出了几种较常见的无刷直流电机的构形图。永磁同步电机反电势是正弦形的,其绕组如同其他交流电机一样通常不是满距,或是接近满距的集中式绕组。许多无刷 直流电机的绕组也是这样。表面安装式磁铁无刷直流电机的反电势波形通常取决于磁铁的磁场取向。要获得正弦形反电势的一般方法是采用磁铁的并联式磁化方向。而梯形反电势 则采用径向磁化方向。最一般的无刷直流电机形式是4极,类梯形反电势波形的表面安装 磁铁电机。23.2控制原理和控制策略一般的自同步无刷直流
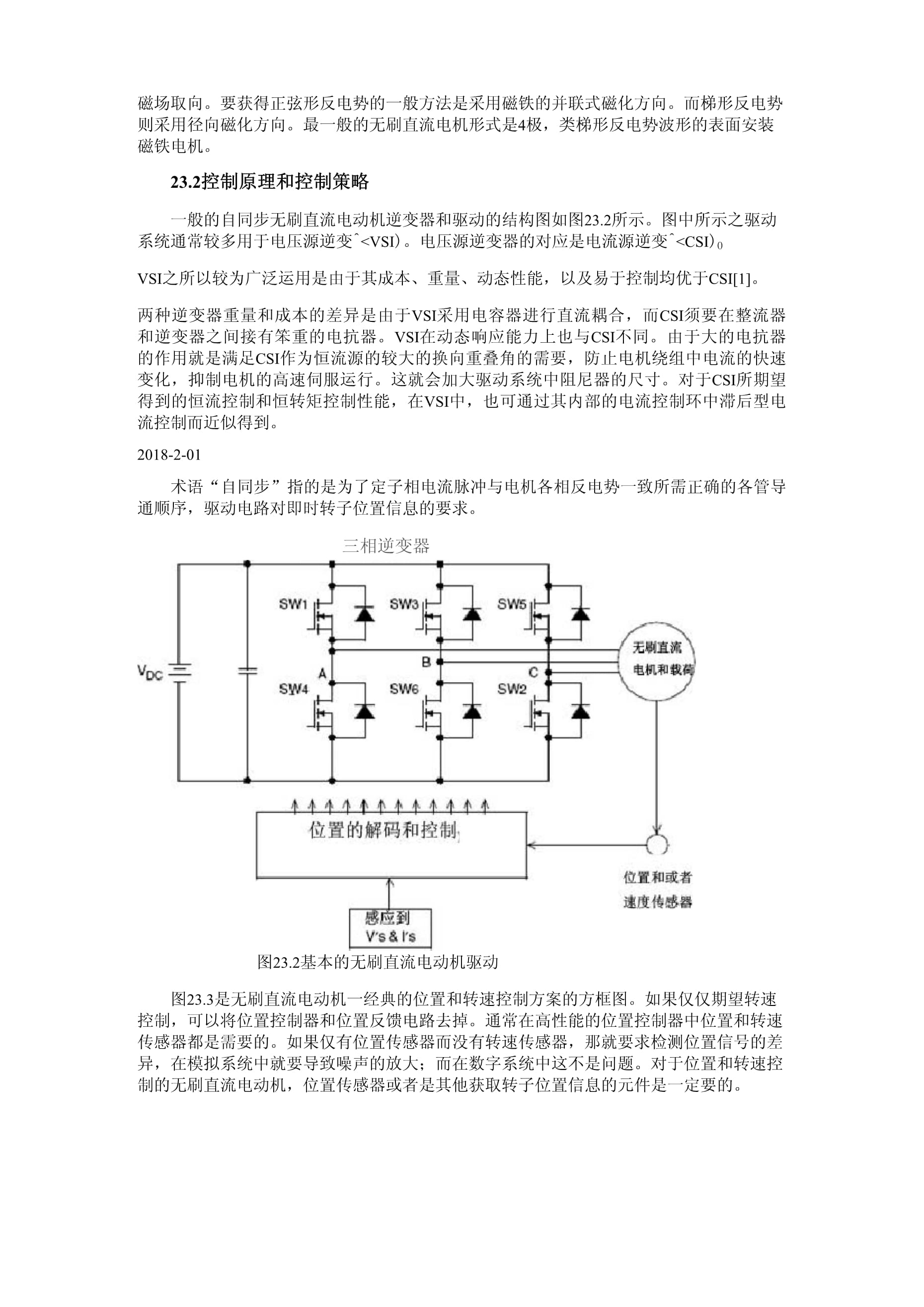
4、电动机逆变器和驱动的结构图如图23.2所示。图中所示之驱动 系统通常较多用于电压源逆变VSI)。电压源逆变器的对应是电流源逆变CSI)OVSI之所以较为广泛运用是由于其成本、重量、动态性能,以及易于控制均优于CSI1。两种逆变器重量和成本的差异是由于VSI采用电容器进行直流耦合,而CSI须要在整流器 和逆变器之间接有笨重的电抗器。VSI在动态响应能力上也与CSI不同。由于大的电抗器 的作用就是满足CSI作为恒流源的较大的换向重叠角的需要,防止电机绕组中电流的快速 变化,抑制电机的高速伺服运行。这就会加大驱动系统中阻尼器的尺寸。对于CSI所期望 得到的恒流控制和恒转矩控制性能,在VSI中,也可通
5、过其内部的电流控制环中滞后型电 流控制而近似得到。2018-2-01术语“自同步”指的是为了定子相电流脉冲与电机各相反电势一致所需正确的各管导 通顺序,驱动电路对即时转子位置信息的要求。三相逆变器图23.2基本的无刷直流电动机驱动图23.3是无刷直流电动机一经典的位置和转速控制方案的方框图。如果仅仅期望转速 控制,可以将位置控制器和位置反馈电路去掉。通常在高性能的位置控制器中位置和转速 传感器都是需要的。如果仅有位置传感器而没有转速传感器,那就要求检测位置信号的差 异,在模拟系统中就要导致噪声的放大;而在数字系统中这不是问题。对于位置和转速控 制的无刷直流电动机,位置传感器或者是其他获取转子位
6、置信息的元件是一定要的。图23.3经典转速和位置控制无刷直流电动机系统方框图许多高性能的应用场合为了转矩控制还需要电流反馈1。至少,需要汇线电流反馈来防止 电机和驱动系统过流。当添加一内电流闭环控制就能实现非常快的电流源逆变器那样的性 能,而不需要直流耦合电抗器,它被称为电流调节电压源逆变CRVSI)1。驱动中的 直流电压调节也可由作用类似直流电源的可控整流器来实现,或者既可通过在变换器中将 PWM信号同时加在上下开关,也可通过仅仅加在上开关或下开关来实现。2018-2-05采用仅通断下开关或仅通断上开关的PWM技术可减少开关损耗,而上下开关同时通 断则正相反。然而,如果运用提前角技术,上下两
7、只管开和关,则由于在一个相臂上导通 的开关管与另一相臂上的续流二极管间存在闭合路径,该路径产生的电流会导致负转矩。 不运用一个“斩波”开关来调节直流母线电压可在驱动系统中省去一个开关,但是采用直 流调节开关,也仅有一只功率半导体器件承受PWM的较高的载波频率开关损耗。采用可 控整流器来改变直流母线电压要求额外的控制测量,增加开关损耗、驱动系统的原初成本 和输电线功率因数控制的复杂性。当该驱动系统由公用电站供电,通常在整流器后要装一 电抗器来降低公共电网的电流谐波含量。电抗器与直流耦合电容器共同工作形成一低通LC 或比例-积分滤波器CLC),该结构的截止频率足够低,可于一极低频率处封锁PWM的
8、载波频率以及较低频率分量 如果有的话),诸如在调速驱动中。直流耦合电容给逆变器的高频纹波电流提供了通路,而电抗器则封锁了较高的频率, 让平均电流通过。如果驱动系统由直流电源供电,也可以用一滤波器来减少流过电源的电 磁骚扰。如果没有采用PWM,单独电流控制对于非调节直流母线的高性能转矩控制也是 有效的。图23.3中的控制器方框“位置控制器”和“速度控制器”可以是如何型式的传统 控制器,如比例-积分控制器,或是一较为先进的控制器。“电流控制器和换向定序器”向 三相逆变器提供适当的定序栅极信号,而将传感器所测电流与参照电流相比较,以通过滞 后 电流斩波)或由一电压源PWM)型电流控制来维持电流控制。
9、滞后电流控制可以是恒频滞后控制、 频段滞后控制,或电平滞后控制。电流控制可用来产生正弦电流波形、限制峰值,或产生 方波电流波形,尤其工作在较低频率下的电机运行在电机性能曲线的转矩限制区域。运用 位置信息,换向定序器就使得逆变器实现“定子换向”,其作用如同直流电机中的机械换 向器。2018-2-06参考文献3中给出开关的详细说明。标准设置无刷电动机的换向角以使电动机在转矩 角曲线的峰值附近换向。就一台三角形联结或星形联结三相电动机来说,其换向发生在转 矩角曲线峰值的前30电角度或后30电角度。当电机的转子位置在峰值前移动了 30电角 度,于是换向传感器就使得相应的定子相通电,其绕组激励后使得转子
10、迅速地移动到相对 于下一转矩角曲线峰值的-30电角度的位置。转矩曲线既可由线与线间联结的通电激励强 迫转子转动,同时测量电机转矩时而得,也可通过施力于转轴,绕组加载,测量不同转子 位置的转矩而得3。一台梯形反电势电机的这些曲线的实际形状也应是梯形的。然而,由 于绕组构形、局部饱和、大部分饱和,以及漏磁的原因,梯形反电势)电机的反电势曲 线和转矩角曲线的形状更接近于扁平峰顶的正弦形4。2018-2-08位置传感器通常既可以是一只3元件霍尔效应传感器,也可以是一只光学编码器。角 度控制器是另一选择,它可让电流脉冲相对于转子位置作相位移动 超前),允许电流脉 冲在电流脉冲/相反电势基准线前接近完全建
11、立,从而能够增加电机的转速范围。角度的提 前是因绕组电气时间常数的要求。电流脉冲的建立需要一给定的时间值。在较高的转速 下,要求在电流脉冲与反电势一致前电流脉冲建立时间短一点也还可以。这种形式运行的 一个问题是其驱动或会“软”一些,例如在直流电机弱磁运行的场合。“软”特性驱动是 那种具备与正常的硬特性驱动相比在同样给定负载变化下转速变化较大的转逸负载转矩特性的驱动。参考文献5中推断,若考虑系统是正弦系统永磁同步电动机),或仅仅考虑准 方波驱动电流和梯形反电势电压波形的基波,在角度超前运行中所需要的反应功率要增 加。23.3转矩的产生图23.4给出一台三相、4极、12槽、满距、表面安装磁极、梯形
12、反电势无刷直流电机 的剖面图,等值电路图和相应的波形图。图中的vab,vbc和vca是线反电势,它们是由永 久磁铁的径向磁通穿过气隙,以与转子转速成正比的速率切割定子线圈而产生的。波形van,vbn和vcn是线对电机中性点的反电势,或相反电势电压,它们是由电机等值电路中的电压源来表示的。定子线圈按标准三相满距集中布置,从而相梯形反电势波形彼此相差120电角度120e)。图23.4中所示电流脉冲发生方式是120电角度通电,60电角度断电,平均每相电流流通于每360电气周期的三分之二时间,正向120电角度,反向120 电角度。在一相各“通电”期间之间是60电角度的“断电”时间,在此期间该相标记为
13、“静默相”。“静默相”期间典型用于无刷直流电机的“无传感器控制”中对反电势进行 观测来确定转子位置。图23.4三相、4极无刷直流电机剖面图,等值电路图和相应的波形图图23.4三相、4极无刷直流电机剖面图,等值电路图和相应的波形图0 60 120190240300 0 60 120100240BLDGSW6. SW1 Active4 Pole |迎?!另一开关规则系统的可能性包括改变电流脉冲的闭锁时间,也就是改变脉冲的“通 电”时间。闭锁时间理论上可以增加至180电角度,然而,在一带有电感的实际电路中存 在换向滞后,所以为换向的交搭,脉冲必须保持一些重叠余地通常不到15电角度)。参 考文献6中测
14、定出通过系统地增加闭锁时间角,从低速时的120电角度开始到高速时的 180电角度,在所有转速下都能获得最大转矩。要获得最大转矩/电流比下的驱动,就得要求线电流脉冲要被特定相的线-中性点反电 势电压所交搭。由转矩产生的基本物理原理,即转矩=总作用力X力臂,可得出最大转矩 输出,式中的作用力由转子磁铁产生的磁通与定子线圈中的电流相互作用而产生。由洛伦 兹力方程回匹稿祝如=J N(xB)dl式中N =每相每槽匝数I =线圈电流B =磁通密度矢量L=线圈边有效长在任意给定时间里都有两相通有直流电流。对于以相同方向流动的电流,一给定极性 的径向磁化磁铁在圆周方向上足够宽,足以覆盖两相邻的槽,从而在两槽中
15、的线圈上产生 力,这些力相加就形成一极下的总电磁力。而电机总的力就是所有磁极下的力的总和。例如,对一台径向磁化磁铁的无刷直流电机,整距绕组,两相同时与方波激励相互作 用,磁铁圆周方向的跨距差不多等于磁极极弧,则转矩可由下式给出7:Tmqic - NNN叩【电LR式中Np=工作相的数目Nt=每相每槽匝数Nspp=每相每极槽数P =磁极数I =直流电流大小Bg=由磁铁给出的气隙径向磁密L =定子和转子重合部分的铁心长度R =转子外圆半径 力臂长)对于一台特定的电机几何形状的最为精确的静态转矩轮廓,在电机制造前,是采用一 有限元软件包中的数值方法来确定的。有限元方法用于现代计算机中,它需要冗长的时间
16、 来算得相对于只要求近似的手工计算要高度精确得多的解。无刷直流电机的有限元方法在 本章稍后讨论。2018-2-0923.4优点和缺点本节的目的是清楚讨论永磁无刷直流电动机PM - BLDC)的优点、缺点和运行基本原 理。也提出一些更为重要的性能特点。永磁无刷直流电动机给汽车工业和航空工业制造商们带来很多优点:1低噪声。PM - BLDC不需要机械电刷或滑环。这就从根本上消除了除了轴承、耦合 以及负荷以外的所有机械噪声。从电磁角度,换向频率取决于电机的转速和电机的极数, 其关系式为 :,:,式中e是电气换向)频率每相),单位为每秒电气弧度rad/s); *是转子机械频率,单位为每秒机械弧度rad
17、/s); P是电机的极数。2018-2-10在驱动变换器中换向所需的每一单独的半导体器件的开和关按电气频率的速率出现, 即每一开关每电气周期开、关各一次。由于在逆变器中经常采用脉宽调kPWM)来控制 母线电压的占空比,所以也得考虑PWM的载波频率的高低。在较小功率系统中,10kW, PWM的载波常常选择高于音频,即15kHz,从而PWM也就不因载波而产生噪声。如果 工作于高载波频率,由占空比改变而产生的谐波在较高载波频率附近被调制,因而也是非 音频的。甚至对于基波频带中的谐波,在无刷直流电动机中其磁致伸缩也只是产生微不足 道的噪声。由于无刷直流电动机正常运行情况下不工作于磁饱和状态,而磁饱和是
18、要引起 磁致伸缩的 象工作于饱和状态的开关磁阻电动机那样产生噪声。)。2高效率。永磁无刷直流电动机PM - BLDC)已显示出是目前可用的最高效率的电机 1,6。1985年的一项研究参见参考文献8)揭示,由于整马力PM - BLDC的高效率, 若将现使用的整马力感应电动机全部换用PM - BLDC,则一年就可能节省电能量达2.8 X 1010kWh。这是基于全部感应电动机一年要消耗6.6X1011kWh的电能量。此项节省等效于 每年节省2000万桶原油,或是节省70亿美元的发电设施建设费用,还要加上每年公用电 网的20亿美元燃油的运行维持费用。参考文献9中类似的研究表明不仅是能源的节省,而 且
19、所节省下来的能源成本可在电机运行不到一年内就抵偿掉PM - BLDC较高的初期成 本。PM- BLDC额定容量越大,其经济优点越明显。PM- BLDC之所以高效率主要是由 于永久磁铁提供了几乎恒定不变、持续的磁场而不消耗电功率。另一个重要的特点是它的 长寿命,在合适的工作条件下永久磁铁交变磁化系数相当小7;也即是永久磁铁能够在很 长时间内保持它们的磁性能不变。另一个效率因数是采用永久磁铁后省去了在直流电机和 部分交流电机中电刷和滑环所引起的附加转矩。3省却励磁。如上所述,永久磁铁提供一恒定磁场,它通过省却了大多数其他电动机 中所需要建立的电磁场的励磁而提高了效率。4低维护和较长寿命。因无需电刷
20、和滑环,故电机的寿命仅取决于绝缘、轴承和磁铁 的寿命。5易于控制。控制和逆变器半导体组件的持续进步降低了对无刷直流电动机驱动的设 计和制造的技术要求。许多半导体制造商生产了专用于无刷直流电动机驱动的控制集成电 路ICs),促成了相当便宜的单片驱动控制器的发展。近来,专为满足电机驱动逆变器要 求而将电力半导体器件与门驱动电路在ICs中的集成产品已经实用化,减少了系统开发总 成本和驱动的初期成本。6较轻及更为紧凑的结构。航空和汽车应用要求较轻及更为紧凑的部件来提高燃油效 率和降低燃油存储需要。最近,更高能量密度的磁铁,钐钻和铷铁硼被用在这些应用领域 中的更高功率密度的电机中。2018-2-117易
21、于冷却。由于电枢定子)绕组在电机的外侧,所以PM- BLDC具有易于散热处 理的固有特性。大家知道PM - BLDC中所产生的损耗的主要部分是绕组中的I2R铜耗 10。既然绕组安放在电机的外侧,所以热就可以自由地通过外表面从电机散逸。这是直 流电机所不具备的优点,在直流电机中绕组的热往往被堵在转子 电枢)中。与所有的现代电机一样,PM- BLDC也有其固有的缺点:1永久磁铁的成本。在相较对得到上述所列所有优点的系统更为在意其初期成本的场 合,较高能量密度的磁铁的高成本就妨碍了它在其中的应用。典型的有,陶瓷磁铁是最便 宜的也是能量密度最低的。铷铁硼磁铁具有最高的能量密度,但其成本差不多是陶籥铁
22、氧体)磁铁的3倍。钐钻磁铁具有与铷铁硼差不多的能量密度,其成本几乎是陶瓷磁铁的 6倍11。成本是原料是否能够用于制造磁铁的可能性的第一位考虑的因素,然而,正如我 们后面要讨论的,除了成本之外的其他考虑,如热,就可能迫使我们在某些应用中不得不 采用特定类型的磁铁材料。2永久磁铁退磁的可能性。在用永久磁铁时得相当小心,由于在永久磁铁遭受到很大 的去磁力或磁铁遭受到高温时都可能退磁。2018-2-133大型磁铁的危险性。永久磁铁电机较少运用在大型驱动中,例如,100Hp。一个原 因是处理较大型永久磁铁时的困难以及大型永久磁铁所呈现的危险。曾有报道说一次制造 大型永磁电机导致金属物体越过房间飞向永久磁
23、铁而造成事故。还有,要将预先充磁的磁 铁放进电机中,其尺寸越大,就要求大功率的加工手段,相对高精度的控制能力,以避免 损坏磁铁。更为安全及更实际的在原位置处磁化要求既可通过专门设计的可以围绕和在组 合式电机内部的线圈系统来实现,也可通过装在电机中的附加绕组对磁铁提供磁化来实 现。两种方法都显著增加了系统的成本。23.5转矩脉动转矩脉动确实是无刷直流电动机驱动中的一个问题。无刷直流电动机驱动中的转矩脉 动有种种原因:换向转矩脉动是由于各相以60电角度间隔开与关。该脉动的频率为6倍的基波频 率。产生这种脉动类型的原因是在一相关断 换向)时另一相导通,各自相电流上升和下 降的速率不相等,如此这两相电
24、流在换向期间产生的转矩不能即时相加到另一完全励磁相 产生的转矩值上,这就引起了在换向间隔中出现一不够平滑的转矩。在参考文献16中,采 用了一种依赖于速度斜坡的斜坡电流来控制开通的那一相和换向的那一相。凭借这两相的 斜坡电流波形使得这两相产生的转矩等于完全电流水平的一相产生的转矩。参考文献6就 曾报告闭环控制能够消除换向转矩脉动,它所提供的这些脉冲的频率低于闭环速度的带 宽。2018-2-14在低速时齿槽转矩是明显的,它是由于磁铁对于定子齿的自然吸引和排斥。一些人更 倾向认为是磁阻转矩,即,齿槽转矩是由于磁铁的磁通试图将转子或定子向磁铁齿部移动 对齐而找到磁阻的最短路径6。一典型的磁阻转矩分布是
25、在有槽定子中的转子的角位置的 函数,而且是周期为丁极距的周期函数12。齿槽转矩可由各种设计方法来克服。减小齿 槽效应的最为普通的电机设计方法是将磁铁或定子槽斜一槽距。不过,这会增加反电势波 形的畸变,且可能会增加轴向力。梯形反电势波形的畸变也可能由转矩脉动引起。这些畸变可以是由于磁铁间的漏磁路 径引起,使得反电势波形的两角处变成圆形1。也还要各种各样的其他原因,诸如,极靴 处局部饱和,由于很大的定子电流产生的电枢反应,并由定子磁场影响到转子的磁场,永 久磁铁部分或局部去磁,有绕组分布带来的电机特定的性能,几何的原因,设计的原因。 相反电势的畸变使其产生不足120电角度的鸡冠波峰平顶),阻止了相
26、反电势与相电流 在120电角度断续的13)内完全同相运行的可能性。如果每一相电流没有在120电角 度范围内完全与对应相反电势同相位,又不采用特殊的控制技术,在CRVSI BLDC驱动中 得到零转矩脉动是不可能的14。2018-2-15转矩脉动的出现也可能来自滞后电流控制频率,或是来自在PWM载波频率速率下对 电流波形的斩波。由电机开槽以及分布绕组与准方波电流激励的耦合造成的谐波也会引起除基波之外的 转矩分量。一般说来,电机在低速和重载时其转矩脉动是最显著的。转矩脉动常常是由其转速脉 动来说明,而转速脉动要易测得多。转速脉动也还与电机与负载的耦合有关,与电机及负 载的机械 动态)特性有关。一高度
27、顺从的转矩刚性不足)耦合或负载将较容易遭受以转 速脉动和机械振动形式出现的转矩脉动,就象一小旋转惯量的系统那样。一般的解决办法 是在可能的情况下尽量采用电机与负载之间的较为硬的刚性耦合。不管是什么负载,除非 在系统中提供了附加的刚性、阻尼,或是提高了其转动惯量,否则机械负载和耦合就要限 定其系统对转矩脉动的固有灵敏度的某个限值。23.6设计考虑磁路、有限元分析的使用、一系列深入细致的几何计算,还有递推设计和再设计使得 无刷直流电机的原理得以实现。典型的,最初设计是计算和磁路分析。接着,一段较为耗 时的借助于有限元分析的“脂肪修剪”工程或将开始。“脂肪修剪”工程包括在不牺牲所 要求的设计技术指标
28、的前提下尽可能减小电机的尺寸。由于通过有限元分析可以得到磁通 分布,因而使用者就可能确定电机在任意工作点和任意转子位置时电机材料的饱和和非饱 和状态。一种简化的、针对磁铁表面安装,假定磁铁材料具有无限大磁导率的梯形反电势 电机的一次通过的设计可以由Matlab程序很容易地开发出来。有关方程和方法可在参考文 献15中查得。一简单的计算机电机设计程序可以提供典型的快速初步试算方法,然后借助 于有限元包进行建模、分析和调整。2018-2-1623.7 BLDC的有限元分析和设计考虑要获得一特定电机的静态的转矩分布,就要将其相对于转子位置的磁通图,或是其他 图解表示或数据输入到有限元包中。将电机的每一
29、部分给以恰当的材料性能赋值,如,给 磁铁赋以Br、Hc、rrecoil值,或许还有其他磁铁参数,如表示它们磁场定向的方向或方 向函数的赋值,磁性材料的磁导率赋值,如果磁性材料各向异性的话,则还要给出极化参 数。电流密度 dicVBC-,bR+Ldt +eh-e(23.2虬GA 二一 VDcfR+L + R成-邪(23.3已知(23.4(23.5(23.6(23.7由方程23.1得叫. dihi R + L; i.R + 1二一+ V心 + 乌-由方程23.2得dib , dicii R. + i R + . 4- eh dt c dtdt(23.9由方程23.3得di(23.10将方程23.6
30、代入方程23.8中! di2 iaR + ;dt(23.11将方程23.10代入方程23.11中(23.12( d|h 弘R + y将方程( d|h 弘R + yLF+ L_ voc + -ec (23.13将方程23.8代入方程23.13中3L(23.14色3L(23.14dt将方程23.5代入方程23.10中jLR + VDC + ec(23.15将方程23.9代入方程23.15中并整理后得dir r -+ 弓 I eh -c J* hDC a in+ j =(23.16dt L31.(23.16方程23.12、23.14和23.16是分别表示A、B、C三相电流的微分方程,只要换相相电 流
31、未降到零在此处,即ic = 0的情况),该微分方程都是成立的。ic = 0以后,直到下一整个换相时序,电压方程为diidihVaR i R + . + e - e. - - i. R,M(23.17dib% =仍+L不+电-。(23.18(23.19以上3方程是将关系式23.20代入方程23.1、方程23.2及方程23.3的结果。dt - dt - (23.20由方程23.17得(23.21现在,有ia = -ib,将ib代入方程23.21中,经过一些变换处理后得c1L R 口亡+残 + i =(23.22dt L a 2L(23.22在ic = 0的情况下,上式是成立的。不过,就充要性来说,
32、在VBC和VCA不确定时,方程23.18和23.19是不成立的。通过下一顺序的运算就可得结果。下rH步,通过下一顺序的运算就可得结果。下rH步,开关5和开关6开始导通,而开关1转换,在ia = 0时,有dibrv- - L R:J -(23.23dibdicVrt _ 0 - R + L-t- + Ci -e_- L-z- - i R1 山(23.24diedia.十一一1.一,:(23.5由方程23.23得i.R + l. - ihR + 1. + e. -c-11 上(23.26由方程23.24得dlb虬i. R + L- irR + L-+ e - e, |:l:-1 (23.27由方程
33、23.25得十 L 心R + y - VDC + e - ei :! -(23.28将方程23.6代入方程23.26,瓦 虬、-一(2329(匕J匕7将方程23.28代入方程23.29,c1L R.乳+ + i =(23.30dt L 旦3L(23.30将方程23.7代入方程23.27,dtbdtb虬eb (23.31将方程23.26代入方程23.31,dib 一 + %一 + 毛(23.32iiF +、 h dt(23.32将方程23.5代入方程23.28,dib2(i_R + 7T 一 L m 1 Tr=i 山 (23.33将方程23.27代入方程23.33后再整理后得,3L(23.343
34、L(23.34在i = 0, i = -i , i = di /dt = 0后,唯一成立的电压方程是方程23.24,将它重新整理ab c a a后就得到如下微分方程眄Rdt * L眄Rdt * Ll-VDC - eb + ec(23.35第一组方程表达的是一下臂开关状态正在转换的情形,其时开关1和开关6正开始导 通,开关2状态正在转换。第一组方程表达的是一上臂开关状态正在转换的情形,其时开 关6和开关6正开始导通,开关1状态正在转换。在这两种情况下除了符号V,这三道微 分方程完全相关联。概括地说,W相是保持状态的相,X相是刚要导通的相,Y相则是正 要关断的相。逆变器的上臂状态转换开关的V也是正
35、的,而其下臂状态转换开关的V则是 负的。此处,开关1、3和5是上臂开关,开关4、6和2是下臂开关。从而一般方程就如 下所示:在iY = 0之前,I1(23.36dlydt(23.37dlydt(23.37c1x R. 官*厂气+ % 丁 L L (23.38在iY = 0之后,也园 R - VDC ew + exl: 1 (23.39为建立计算机程序仿真模型,经由方程23.39的方程23.36的求解方法可以有很多选 择。选择最多的方法是数值积分法和离线分析法。离线分析法可以在能够在拉普拉斯域中 进行,而三相电流则可得到时域方程的解。该方法如下所示。考虑方程23.36,拉氏域方程列出如下1- 2
36、VDC+ eY_ + exlw(s)R + 协临-弓(23.40a略作整理,上 + 二(23.40b,.、-2VDC + ey2ew + ex 口 顷= 3s(R + sL上 + 二(23.40b TOC o 1-5 h z 该方程给出了时域解 FT IO IRR-27+ ey - 2ew +气-t岫)=玄I 。)旧-(23.41另外两相电流RRVDC + eW2eX+eY/ -t+-诲iv(t)=而H -e I iv(O)e,-1(23.42RR*DC + % -关丫+弼- Y4)3Rl-Q + 项血(23.43方程23.41,方程23.42和方程23.43是iY = 0之前的时域解。在iY = 0之后,其解变为ljr ,RR-V)C + ew + ex/ _ 己1 f t _ T侦印2R 1 -e + (t Tik-(23.44式中t1是第二个模式的开始时间,即在iY = 0时。在运用这些方程中的微妙的难点是每一个方程中的指数时间t,在每一特定的相电流跃起或跌落的开始,指数t为t = 0。解相电流微分方程的
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2025年云南省安宁市高二生物下册期末考试模拟卷含答案【B卷】
- 2025年江西省瑞金市高二生物下册期末考试测试卷【新题速递】附答案
- 2025年江苏省太仓市高二生物下册期末考试试卷附参考答案【夺分金卷】
- 2026年湖南省涟源市高二生物下册期末考试检测卷含答案AB卷
- 2025年黑龙江省富锦市高二生物下册期末考试模拟卷附答案(完整版)
- 2025年河南省新密市高二生物下册期末考试试卷附答案(A卷)
- 2025年辽宁省开原市高二生物下册期末考试考试卷含答案(完整版)
- 2026年山东省禹城市高二生物下册期末考试测试卷带答案(夺分金卷)
- 2026年湖北省枣阳市高二生物下册期末考试考试卷及答案(必刷)
- 2026年江苏省溧阳市高二生物下册期末考试测试卷【完整版】附答案
- 雨课堂学堂云在线《人工智能原理》单元测试考核答案
- 2025年内蒙古呼道德与法制中考试卷和浩特
- 2025年江苏省苏州工业园区管委会招聘14人历年高频重点提升(共500题)附带答案详解
- (高清版)DB52∕T 1450-2019 河道管理范围划界技术规程
- 卫生化学(人卫第七版)考点全套
- 《财务管理学(第10版)》课件全套 王化成 第1-12章 总论、财务管理的价值观念-并购与重组
- 中国戏曲剧种鉴赏智慧树知到期末考试答案章节答案2024年上海戏剧学院等跨校共建
- 汽车维修工时收费标准(二类企业)
- 韶音供应商QSA+QPA审核-checklist-V1
- JGT483-2015 岩棉薄抹灰外墙外保温系统材料
- 墩柱模板计算书1
评论
0/150
提交评论